
作者:重庆邮电大学 唐林 杜坤霖 游立伟
指导教师:程安宇
作品简介
第一章 引言
所用车模型号为99-BDG76899-1。采用16 位MCU(MC9S12XS128)作为主控制单元,自主设计、制作一辆能够自动识别特制跑道并能沿跑道行驶的智能小车。整个系统主要包括三大方面:机械结构安装,硬件电路设计,软件算法设计。按模块划分为:电磁传感模块,电机控制模块,舵机驱动模块,速度检测模块,电源模块等。整个系统为一个闭环控制系统,通过电磁传感采集的道路信息及软件算法对起跑线、直道、弯道等的判别来调节舵机转向,控制小车的位置。结合速度检测模块的反馈信息精确控制小车的运动状态。以主MCU为中央纽带控制和协调各模块调理有序的稳定运行。后文将分别从机械结构、系统硬件设计、软件设计三大方向对各子模块进行详细解析。
第二章 系统总设计方案论证
2.1设计思路
小车比赛属竞速比赛,对速度要求较高。所以首先考虑到的是小车动力问题,驱动电路的设计和芯片的选型很重要。另一个重中之重就是“目标”的问题。对于小车来说,道路信息就是目标,解决小车对道路信息的采集、处理就成了主要任务(也是重要任务)。解决上述问题后,剩余的工作就是让小车成为一个系统,让各模块统一协调工作。因为采用闭环控制可使系统更加稳定,控制更精确。所以可让MCU综合速度检测信息和道路检测信息控制转向和动力输出形成一个环回路的控制系统。
综上所述,所需解决的主要问题有:道路检测方法,驱动芯片选型,速度检测方法,转向控制等。
2.2 道路信息检测
方案一:CCD/CMOS摄像头检测
使用摄像头获取路面图像信息,采用图像处理技术判断路径,是路径识别中常用的方法之一。
方案二:红外检测
红外检测是通过传感器发射特定波长的红外光,通过反射光的不同来识别道路。
方案三:电磁检测
通过检测规定频率电磁场的强度和方向可以反过来获得距离导线的空间位置,以此来识别道路。
以上两种方案的优缺点比较如表2.2.1示:
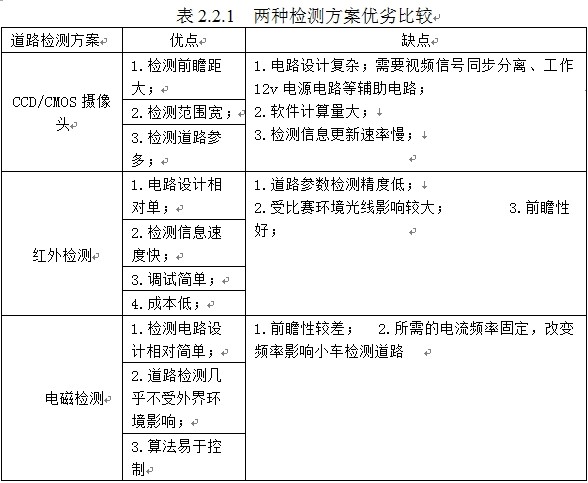
通过上述对两种方案的比较,由于摄像头的图像处理技术、软件算法较为复杂。红外检测受比赛场地光线的影响大,算法和机械结构在有限的时间内难以改善。而电磁检测电路设计较简单,几乎不受光线等外部因素限制。最后决定采用第三种方案(电磁检测)。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

