
作者:广东工业大学 冯国荣 陈锦伟 吴日燊
指导教师:蔡述庭 谢云
作品简介
摘要
第一章 引 言
本智能小车以飞思卡尔16位微控制MC9S12XS128作为唯一的核心控制单元,采用电感线圈和干簧管获取道路信息,通过设计简单的PID速度控制器和简单的PID方向控制器实时调整小车的速度与转角。
本报告分为七个章节:第一章为引言介绍;第二章介绍了本智能车的机械设计;第三章具体介绍了智能车传感器选择与布局设计;第四章具体介绍了智能车硬件电路设计;第五章介绍了智能车的软件设计;第六章为智能车开发与调试环境;第七、九章为智能车技术参数说明及总结。
第二章 机械结构部分
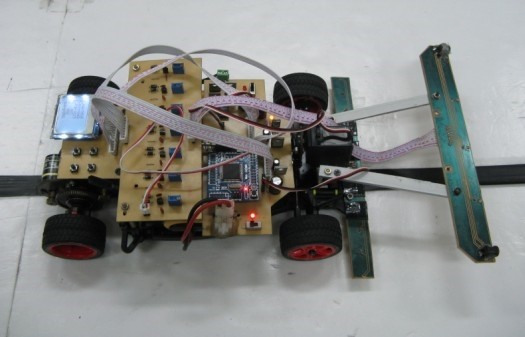
图2.0 智能车整体图
2.1 舵机的固定与安装 在舵机的安装过程中,我们发现,将舵机的摆臂增长可以提高舵机的响应速度。因为舵机的摆臂越长,当车轮转过相同的角度时,舵机转过的角度越小,即时间越短。买回来的车模舵机是横着安装,我们后来把它竖着安装,增长了摆臂,如图2.1.1所示,而且两条拉杆的长度也在合理的范围内做了相应的调整。虽然加大力臂会加快舵机的转向,但是力臂的长度和力矩是成反比的,会导致舵机有一个空转的角度,所以要在多次的实验中选择合适的力臂。如图2.1.2所示:

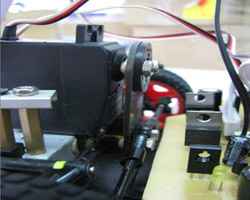
图2.1.1 舵机安装图1 图 2.1.2舵机安装图2
2.2 前轮的调整
调试中发现,前轮的初始状态对车子转弯有很大的影响。总的来说,决定前轮的初始状态有以下几个参数:主销内倾、主销后倾、前轮外倾、前轮前束。
全文请访问:电磁组广东工业大学IC队技术报告.doc
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

