
作者:东北大学秦皇岛分校 赵建抒 黄阿娟 辛永祥
指导教师:王凤文 马淑华
作品简介
第一章 引 言
1.1 智能车的现状及发展
汽车工业发展已有100多年的历史。自20世纪80年代以来,智能控制理论与技术在交通运输工程中越来越多的被应用,在这一背景下,智能汽车的概念应运而生。所谓智能汽车,就是在网络环境下用信息技术和智能控制技术武装的汽车。智能汽车是一种高新技术密集的新型汽车,研究人员正从智能汽车的信息系统、控制系统、网络环境及智能结构等几个方面进行研究。【1】
智能汽车的设计和开发,将从根本上改变现有汽车的信息采集处理、数据交换、行车导航与定位、车辆控制的技术方案与体系结构。随着科学技术的发展,特别是计算机技术、信息技术、人工智能、电子技术的突飞猛进,智能车辆技术有了实现的技术基础。目前智能车辆技术在轿车和重型汽车上主要应用于碰撞预警系统、防撞及辅助驾驶系统、智能速度适应、自动操作等,其在军事上的应用更加广泛和重要。
车辆智能化是汽车工业今后的发展趋势,也是人们对安全性要求越来越高的未来汽车的发展方向。随着计算机技术和信息技术为代表的高新技术的发展,人工神经网络技术、模糊控制技术、神经模糊技术、虚拟实现等新技术的出现,智能车辆技术的研究将会有突破性的进展。智能车辆系统的实用化是智能车辆发展的前进方向,适应性强、环境适应性好的智能车辆将是研究的重点。
智能车有着极为广泛的应用前景。结合传感器技术和自动驾驶技术可以实现汽车的自适应巡航并把车开得又快又稳、安全可靠;汽车夜间行驶时,如果装上红外摄像头,就能实现夜晚汽车的安全辅助驾驶;它也可以工作在仓库、码头、工厂或危险、有毒、有害的工作环境里,此外它还能担当起无人值守的巡逻监视、物料的运输、消防灭火等任务。在普通家庭轿车消费中,智能车的研发也是很有价值的,比如雾天能见度差,人工驾驶经常发生碰撞,如果用上这种设备,激光雷达会自动探测前方的障碍物,电脑会控制车辆自动停下来,撞车就不会发生了。【2】
2.2.1 系统总体方案选择
通过学习竞赛规则和往届竞赛相关技术资料了解到,路径识别模块是智能车系统的关键模块之一,路径识别方案的好坏,直接关系到最终性能的优劣,因此确定路径识别模块的类型是决定智能车总体方案的关键。而目前能够用于智能车辆路径识别的传感器主要有光电传感器、CCD/CMOS传感器和电磁传感器。光电传感器和电磁传感器寻迹方案的优点是电路简单、信号处理速度快,但是其前瞻距离有限;CCD摄像头寻迹方案的优点则是可以更远更早地感知赛道的变化,但是信号处理却比较复杂,如何对摄像头记录的图像进行处理和识别,加快处理速度是摄像头方案的难点之一。在比较了三种传感器优劣和分析第五届飞思卡尔杯智能车竞赛技术要求之后,决定采用电磁传感器,相信通过分析磁场的特性和加之精简的程序控制和较快的信息处理速度,电磁传感器还是可以极好的控制效果的,而且相对于摄像头组和光电组,使用磁场信号引导车沿一定轨迹行走的优点主要体现在磁场信号具有很好的环境适应性,不受光线、温度、湿度等环境因素的影响,同时由于是第一次开设电磁组,可以挑战自己的创新性,电磁组车模实物图如图2.1。
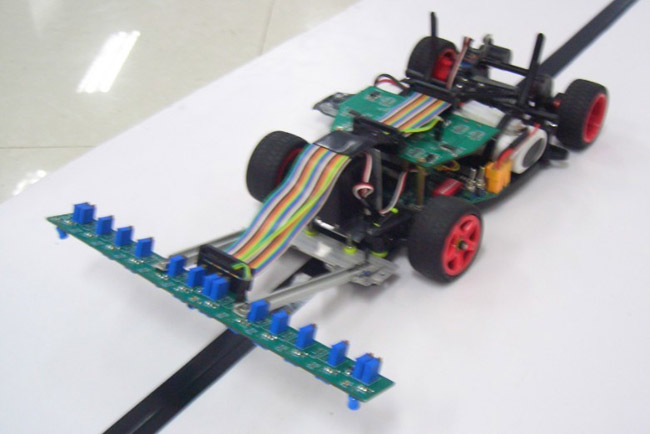
图2.1 感应线圈传感器参赛车
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

