
作者:中南大学 吴志辉 陈水保 陈彬
指导教师:王击 徐德刚
作品简介
第一章 引言
1.1 背景介绍
全国大学生智能汽车竞赛是在统一汽车模型平台上,使用飞思卡尔半导体公司的8位、16位微控制器作为核心控制模块,通过增加道路传感器、设计电机驱动电路、编写相应软件以及装配模型车,制作一个能够自主识别道路的模型汽车,按照规定路线行进,以完成时间最短者为优胜。该竞赛是涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械及车辆工程等多个学科的科技创意性比赛。
全国大学生智能汽车竞赛已经成功举办了六届,比赛规模不断扩大、比赛成绩不断提高。通过比赛促进了高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神,为优秀人才的脱颖而出创造条件。[1]
从2011年10月开始,我们就开始着手准备这项赛事。历时10个月时间,经历了机械构造、硬件方案、算法思路的不断创新,这些创新体现在设计理念上,也贯穿赛车制作过程的始终。由于这些创新,赛车各方面综合性能得到提升,并且获得了良好的赛场表现。本技术报告将详细介绍我们为第七届“飞思卡尔”杯全国大学生智能汽车邀请赛而准备的智能车系统方案。
1.2 整车设计思路
1.2.1 控制系统
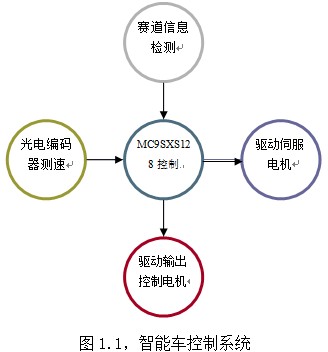
智能车系统是一个相对复杂的反馈系统(如图1.1)。CMOS摄像头采集的赛道图像信息、光电编码器采集到的车体运行速度、加速度传感器采集到的车体纵向和横向加速度,是反馈控制系统的输入量。执行器(直流电机和伺服舵机)以及模型赛车构成反馈系统的装置。飞思卡尔S12系列的16位单片机是系统的控制器。在智能车系统的搭建到赛车快速、稳定地按照赛道行驶的整个过程中,反馈原理是我们分析问题和解决问题的基本原理。
全文请访问:摄像头组-中南大学-比亚迪金牛座2012.doc。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

