
作者:河北大学工商学院 阎奕名 毛冲冲 王利娜
指导教师:杨子波 孙宏伟
作品简介
摘 要
本文主要介绍了智能小车控制系统的软硬件设计及开发过程。整个系统涉及车模机械结构调整、电机驱动和光电传感器的电路设计、路况采集和信号处等多个方面。车模以MC9S12XS128单片机为控制核心,以安装在跟踪舵机之上的激光管作为循迹传感器,采用红外与激光传感器配合的模式检测直线和起跑线,以2.5ms为一周期处理路况信息。
车模系统的简单工作原理是MC9S12XS128单片机收集激光和红外传感器返回来的赛道信息,通过相应运算后,软件判断其有效性,结合控制算法控制随动舵机给出合理舵值,控制前轮舵机转向,单片机再给出合适的PWM波占空比以控制电机转速,速度控制方面采用一个500线增量式光电编码器来实时反馈脉冲,利用单片机的脉冲累加器采集速度。最后主控制芯MC9S12XS128 综合激光的采集的路面信息和编码器采集的速度信息,利用PID算法实现摇头舵机的转角,转向舵机的转角控制及电机的调速。
经实际场地测试,本车模系统可以很好的适应大小“S”弯,“十”字交叉和大回环等不同的赛道类型以及不同类型赛道的不同组合。
第一章 引言
1.1 综述
全国大学生飞思卡尔智能汽车竞赛是由教育部高等自动化专业教学指导分委员会主办,以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,是以智能汽车为竞赛平台的多学科专业交叉的创意性科技竞赛。该竞赛以飞思卡尔半导体公司为协办方,如今已成功举办六届。
全国大学生“飞思卡尔”杯智能汽车竞赛是在规定的模型汽车平台上,使用飞思卡尔半导体公司16位微控制器作为核心控制模块,通过增加道路传感器、电机驱动电路以及编写相应软件,制作一个能够自主识别道路的模型汽车,按照规定路线行进,以完成时间最短者为优胜。
今年赛道有所改动,具体规则如下:
1) 赛道路面用专用白色KT基板制作,在初赛阶段时,跑道所占面积在5m×7m左右,决赛阶段时跑道面积可以增大。
电磁组(车模直立行走)的赛道相对简单,长度短。
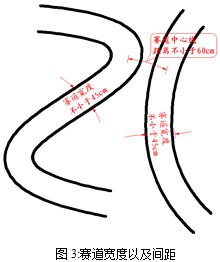
2) 赛道宽度不小于45cm。赛道与赛道的中心线之间的距离不小于60cm。如下图所示:
3) 铺设赛道地板颜色不作要求,它和赛道之间可以但不一定有颜色差别。
4) 跑道表面为白色,赛道两边有黑色线,黑线宽25mm±5,沿着赛道边缘粘贴。
全文请访问:光电组 河北大学 工商学院 灵锐一队 技术报告.doc。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

