
作者:清华大学 张迪 张旭 张欣然
指导教师:陆耿 李默
作品简介
第一章 引言
1.1 概述
“飞思卡尔”杯全国大学生智能汽车邀请赛今年进行到第五届,四年经验的积累使得比赛形式丰富,比赛规则比较完善,为广大同学提供了一个良好的学习提高的平台。第五届大赛,为了拓展赛道检测形式,在原有CCD组和光电组基础上增加了电磁组,以100mA的交变电流为赛道,自主开发检测传感器,检测赛道信息。
为响应教育部关于加强大学生的创新意识、合作精神和创新能力的培养的号召,我们组队积极参加了第五届“飞思卡尔”杯全国大学生智能汽车邀请赛电磁组的比赛。从2009年10月开始着手进行准备,历时近10个月,鉴于电磁组与光电、CCD在检测方法上有本质的不同,我们在传感器设计上采用电感线圈检测磁场,通过在多个点布置不同方向的检测传感器获取赛道信息,利用所获取的信号进行处理,实现对赛车转向、速度进行控制。
同时,我们利用前几届比赛积累下的经验,继续加强在电源管理、噪声抑制、驱动优化、整车布局等方面的研究工作,使智能车能够满足高速运行下的动力性和稳定性需求,获得了良好的综合性能和赛场表现。
本技术报告将针对我们的传感器信号处理设计安装、底盘参数选择、电路设计、HCS12控制软件主要理论、控制算法等方面进行阐述,并列出了模型车的主要技术参数。
1.2 整车设计思路
1.2.1 控制系统
智能车的工作模式如下图所示:电磁传感器获取赛道某点电磁特性,信号输入到S12控制核心,进行进一步处理以获得赛道信息;通过光电编码器转速传感器检测车速,并采用S12 的输入捕捉功能进行脉冲计数计算车速和路程;通过片上AD检测电池电压;舵机转向采用分段PID控制;电机转速控制采用PID控制,通过PWM控制驱动电路调整电机的功率。
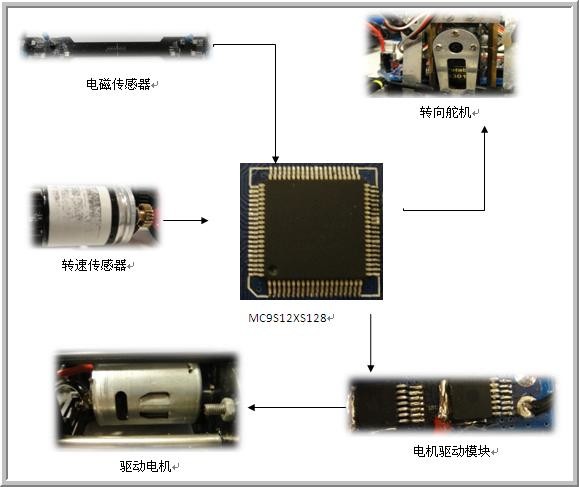
图1.1 智能车的工作模式
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

