
作者:天津大学 李楠 曹润 周天熠
指导教师:王建荣 李燕青
作品简介
摘 要
本文以第七届全国大学生飞思卡尔杯智能汽车竞赛为背景详细介绍了智能车系统的软硬件结构和开发流程。采用1:10 的仿真车模,用激光传感器来识别赛道信息,以飞思卡尔半导体公司生产的16 位单片机MC9S12XS128 为核心控制器,在CodeWarrior IDE v5.1开发环境中进行软件开发,使赛车在跑道上沿着黑线以最快的速度行驶。
论文介绍了总体方案设计、机械结构设计、硬件电路设计、软件设计、无线通信子系统设计以及系统的调试与分析。机械结构设计部分主要介绍了对车模的改进,以及三舵机随动系统的机械结构。硬件电路设计部分主要介绍了智能车系统的硬件电路设计,包括原理图和PCB设计。软件设计方面,主要介绍了三随动舵机的控制原理和电机的PID 控制策略。
为了直观显示赛车在赛道上高速前进过程中的某些关键参数,我们利用无线通信模块APC250来搭建了赛车和PC机之间通信的桥梁,这样使得整个调试过程有理有据。
第一章 绪 论
1.1 大赛简介
为加强大学生实践、创新能力和团队精神的培养,促进高等教育教学改革,由教育部高等学校自动化专业教学指导分委员会主办全国大学生智能汽车竞赛。该竞赛是以智能汽车为研究对象的创意性科技竞赛,是面向全国大学生的一种具有探索性工程实践活动,是教育部倡导的大学生科技竞赛之一。该竞赛以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,旨在促进高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神,为优秀人才的脱颖而出创造条件。
该竞赛由竞赛秘书处设计、规范标准硬软件技术平台,竞赛过程包括理论设计、实际制作、整车调试、现场比赛等环节,要求学生组成团队,协同工作,初步体会一个工程性的研究开发项目从设计到实现的全过程。该竞赛融科学性、趣味性和观赏性为一体,是以迅猛发展、前景广阔的汽车电子为背景,涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械与汽车等多学科专业的创意性比赛。该竞赛规则透明,评价标准客观,坚持公开、公平、公正的原则,力求向健康、普及、持续的方向发展。
我们凭着对科技研究的浓厚兴趣报名参加了第七届“飞思卡尔”杯全国大学生智能汽车竞赛。在备战的过程中,充分应用了大学本科期间所学习的各门课程,例如:模拟电子技术,数字电子技术,微机原理,C++程序与设计,测控电路等等。此外我们还阅读了大量课外的相关书籍,比如《Freescale 9S12十六位单片机原理及嵌入式开发技术》,《激光原理及应用》,《汽车前轮定位》等等。通过对这一课题的研究,极大的提高了我们将所学知识运用于实践的能力以及自学的能力。
1.2 规则要求
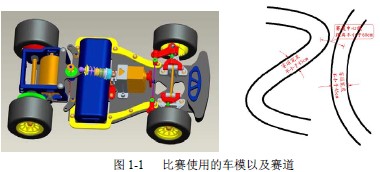
本课题要求使用规定的1:10的仿真车模底盘(如图1-1左),加装自行设
计的传感器,在用白色KT板搭建的两边贴有黑线(黑线宽2.5cm)的宽为50cm的封闭赛道上以最快的速度跑完一整圈,中途不能冲出赛道,不能停车以及倒车,而且必须在跑完一圈后自动识别起跑线标志,做出刹车动作,最后停在起跑线后三米的区域内。黑线两侧的颜色(即跑道背景色)是未知的,也就是要求赛车能够适应任何的赛道背景,换句话说,黑线外侧的信息不能作为赛车识别赛道曲率变化的有效信息来使用。赛道包含以下几种元素:长直道,短直道,大回环,小回环,弯道,S型弯道,交叉型赛道等,所有元素之间平滑连接,赛道最小曲率半径为50cm,且赛道随机搭建,即比赛前是无法得知赛道的具体形状的,因此赛车必须对随机变化的赛道有很好的识别和适应能力。
1.3 论文结构
本文从第二章开始主要介绍了我们在备战第七届飞思卡尔智能车大赛光电组的过程中所做的各项研究工作,按照各项工作的领域划分为4个章节分别具体介绍各部分的设计与改造,其中:
第二章为机械系统的设计以及调校。主要介绍了对车模底盘的机械调整以及传感器固定支架的设计、加工和安装,车模机械调整部分包括车模前轮参数的调整、整车重心的调整、传动齿轮间隙的调整、差速器的调整、车模刚性的调整等,传感器支架设计部分包括转向舵机的安装、点头舵机的安装、摇头舵机的安装、激光传感器的安装、测速编码器的安装等。
第三章为电路部分的设计。车模所有的电源均来自一块额定电压7.2V,容量2000mAh的镍镉可充电电池,不允许外加电源,因此电路上首先需要将来自电池的电压进行一系列的DC-DC转换以提供给不同的模块。除了电源处理电路部分外,还需设计的电路有激光传感器驱动电路、激光接收电路、电机驱动电路、矩阵键盘电路等。这些都将在第三章逐一详细介绍。
第四章为软件部分的设计与调试。本课题要求赛车自主运行在赛道上,不允许有任何遥控的设备与其进行通信。因此必须为该套系统选择一款合适的微处理器来作为整个系统的“大脑”,综合处理赛道信息以及车模的各种反馈信息,来控制赛车合理的加减速和转弯。我们选择了飞思卡尔公司生产的MC9S12XS128这款16位的微处理器来作为赛车上唯一的核心控制单元,在CodeWarrior IDE v5.1环境下编写C语言代码,来达到赛车对赛道的自动识别并稳定高速运行在赛道上的目标。具体控制算法的设计将在第四章详细介绍。
第五章为总结章节,主要介绍本系统的优势和不足以及改进的方向。
全文请访问:光电组 天津大学 光电一队 技术报告.pdf。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

