
作者:中国石油大学 王田农 杨念振 周岳
指导教师:王宇红 鄢志丹
作品简介
摘 要
本文按照第七届飞思卡尔杯智能汽车竞赛要求详细介绍了智能车系统的软硬件结构和开发流程。采用仿真车模,以飞思卡尔半导体公司生产的16 位单片机MC9S12XS128 为核心控制器,在CodeWarrior IDE 开发环境中进行软件开发,使赛车在跑道上沿着黑线以最快的速度行驶。本文介绍了总体方案设计、机械结构设计、硬件电路设计、软件设计以及系统的调试与分析。机械结构设计部分主要介绍了对车模的改进,以及两个舵机随动系统的机械结构。硬件电路设计部分主要介绍了智能车系统的硬件电路设计,包括原理图和PCB 设计。软件设计方面,主要介绍了两个随动舵机的控制原理和电机的PID 控制策略。
第1 章 前 言
1.1 概述
全国大学生飞思卡尔智能汽车竞赛是受教育部高等教育司委托,由教育部高等自动化专业教学指导分委员会主办的全国大学生智能汽车竞赛。该竞赛以智能汽车为研究对象的创意性科技竞赛,是面向全国大学生的一种具有探索性工程实践活动,是教育部倡导的大学生科技竞赛之一。该竞赛以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,旨在促进高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神,为优秀人才的脱颖而出创造条件。
在本次比赛中,本组使用大赛组委会统一提供的竞赛车模,采用飞思卡尔微控制器作为核心控制单元,自主构思控制方案及系统设计,包括传感器信号采集处理、控制算法及执行、动力电机驱动、转向舵机控制、最小系统 MCU 等,最终实现一套能够自主识别路线,并且可以实时输出车体状态的智能车控制硬件系统。在制作小车的过程中,我们对小车的整体构架进行了深入的研究,分别在机械机构、硬件和软件上都进行过改进,硬件上主要是考虑并实践各种传感器的布局,改进驱动电路,软件上先后进行了几次大改,小车的寻线方式从最先的线性拟合到现在位置加权,最终确定的适应性更强的优化的位置加权的方法。控制算法上,从PID 到Bang-Bang,再到模糊PID 都进行了一些研究。
1.2 光电组智能车
1.2.1 光电组智能车的路径检测原理
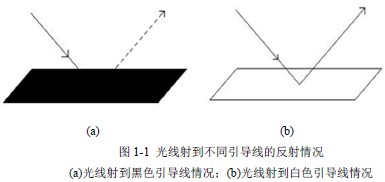
光电智能车是基于光的漫反射原理来检测路径的。光线照到白色赛道反射回来的光线强,照到黑色赛道反射回来的光线很弱(如图1-1 所示)。通过反射回来的光线的强弱来判断赛道情况。
1.2.2 光电组智能车的优缺点
光电组智能车优点:电路简单、信号处理速度快、响应快速、功耗较低等。光电组智能车能在很短的时间内提供给控制芯片采集到的数据,大概是1-5ms就能完成一次赛道信息采集,而摄像头组智能车至少是20ms,原因是市面上的传感器都是50Hz,就是20ms 能够采完一整幅图像,经模数转换后提供给单片机。
光电组智能车缺点:检测精度很低、空间分辨率低、数据量少、安装固定接线较困难、占用CPU 端口较多、检测容易受到外界环境影响等,所以要尽可能从反馈回来的数据中挖掘信息。干扰问题可以通过调制频率,然后在发光时采用分时发射得到有效解决。
全文请访问:光电组 中国石油大学(华东)蹑影追风队 技术报告.pdf。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

