
作者:西安交通大学 张弘冀 罗阳 马超
指导教师:刘小勇 昝鑫
作品简介
摘要
本文在第五届“飞思卡尔”杯全国大学社工智能汽车竞赛的背景下,在CodeWarrior
IDE 开发环境中对智能车进行软件开发,通过激光传感器进行赛道信息的采集,利用
小车携带的单片机对信息进行处理,得到小车与中心引导线之间的误差数据,通过PID
控制算法,得到小车舵机的偏转角度数据和电机转速控制参数,用来控制小车完成对
中心线的跟踪。
智能车系统主要由核心板,电源驱动,电机驱动,舵机驱动,赛道识别模块,速
度反馈模块组成。由一片飞思卡尔公司的16 位单片机MC9S12XS128 作为控制核心,
通过采用分立的激光管组成的光电传感器作为赛道信息的采集模块,结合自己编写的
PID 基础控制算法和电机控制程序,驱动舵机完成转向命令,电机控制小车速度,达
到稳定且快速行驶的目的。本文详细叙述了智能车系统各个模块子系统的原理,设计
目标,设计方法与过程,以及其所发挥的作用。主要分为机械结构设计,硬件电路设
计和改进,以及软件系统设计三大部分。其中机械部分设计到新车模的改装和调试,
硬件电路包含从传感器到驱动等一系列所用到外围支持电路设计,软件部分主要介绍
了如何实现激光传感器完成寻线任务的说明和部分程序。
实验表明,我们的智能车系统设计方案稳定可行,机械结构与控制算法已经可以
较好的适应比赛的要求,系统的稳定性较强。经测试,目前智能车可以稳定的完成较
复杂的赛道的寻线控制,平均速度达到2.3m/s,直道上最高速度可以达到5m/s。运行
稳定,达到了设计目标。
关键词:智能车;MC9S12XS128;激光传感器;PID 控制
1 引言
绪论:全国大学生智能汽车竞赛是以智能汽车为竞赛平台的创意性科技竞赛,是
面向全国大学生的一种具有探索性的工程实践活动,是教育部倡导的大学生科技竞赛
之一。这里所说的智能车,就是指在无人干预的情况下以微控制器对模型车进行控制,
控制其方向及速度,从而达到良好的效果。
1.1 背景概述
本课题以全国大学生智能车竞赛为背景,其目的是设计、制作一个能够实现自主
循迹运行的智能模型车系统,如果应用与真正的车辆系统,则可以称之为自动导航驾
驶系统。此项比赛已经成功举办了四届,我们将参加第五届的比赛。
“飞思卡尔”智能车竞赛是由教育部高等学校自动化专业教学指导分委员会主
办,飞思卡尔半导体公司协办的全国性的比赛。智能车竞赛所使用的车模是一款
带有差速器的后轮驱动模型赛车,它由大赛组委会统一提供。比赛要求参赛队伍
研究并设计一款能够自主辨识路线并能够自主行驶的智能车,在专门设计的封闭
跑道上行驶,跑完整个赛程用时越短的参赛队伍成绩越好。智能车的设计要求参
赛队伍首先对汽车动力学有一定的研究和了解,从而设计合理的机械结构。同时
要求参赛队伍自行设计控制器系统电路、图像采集模块电路、电机驱动电路、电
源模块电路等多个部分的电路。在硬件平台搭建完成后,参赛队伍要对智能车系
统的路线辨识以及控制算法进行开发和调试,为了后期的调试方便,很多队伍还
开发了用于调试的上位机监控程序。赛道起始线示意图如图1-1 所示:
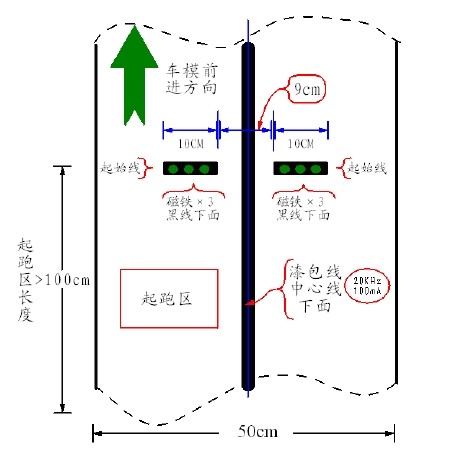
图1-1 起始线示意图
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

