
作者:重庆邮电大学 韩恺敏 徐雪洋 张磊
指导教师:胡向东
作品简介
从2010 年4 月份开始准备,我们全身心投入到了飞思卡尔智能汽车比赛的准备中,由于第五届的比赛采用了新的四驱车模,我们在对新车模的不断更新改造中,也在不断学习进步,从减震的尝试到舵机的改装再到重心的迁移。在算法上也是不断改进,我们尝试了单排,双排最后定位到单排转头,期间由于大家的相互协作,共同努力,还有在指导老师的精心指导下,使我们能在短时间内去得一些目标性的进展。互助共勉,是我们进步的基石。飞思卡尔智能车让我们学到的不仅是知识,更让我们懂得团队协作的重要性。
1.2设计思路
1.21智能车硬件部分设计思路
硬件电路设计遵循低功耗,电路简单可靠,前瞻合适,单片机资源合理化使用的原则,设计了一些低功耗并且控制简单的电路。电路板的制作也进行了最小化设计,为机械设计打好基础。
1.22智能车软件部分设计思路
从整体算法考虑,软件上主要能够有良好的适应性,高响应速度等。
1.23智能车机械部分设计思路
在硬件电路板设计上进行最轻量化设计后,在机械结构上,尽量是重心
遵循,低、中、后的原则。力求使智能车最稳定运行。
1.2系统总体方案的设计
在对整体方案进行设计后,基于轻量化的选择和电路板的设计我们选择了体积更小的MC9S12XS128MAA 单片机作为核心控制单元。在需要大前瞻的条件下我们使用了激光传感器,选择40cm 的前瞻。系统总体方框图如图。
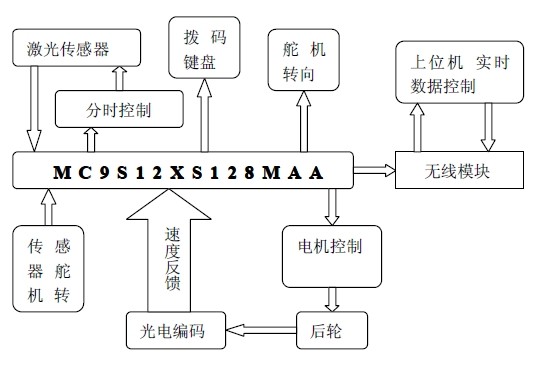
图1.1 系统框图
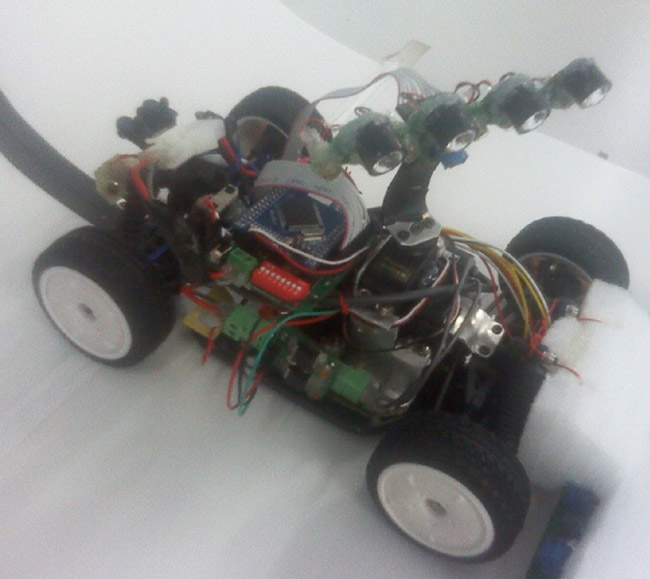
图1.2 智能车整体图
全文请访问:光电组-重庆邮电大学-踏风队-技术报告.pdf
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

