
作者:浙江工业大学之江学院 叶晓运 余红淳 张佳勇
指导教师:杜树旺 周云水
作品简介
第一章 引言
1.1智能车概述:
1.1.1智能车的发展历史
智能车的研究始于20世纪50年代初美国 Barrett Electric 公司开发出的世界上第一台自动引导车辆系统(Automated Guided Vehicle System,AGVS)。1974年,瑞典的Volvo Kalmar轿车装配工厂与Schiinder-Digitron公司合作,研制出一种可装载轿车车体的AGVS,并由多台该种AGVS组成了汽车装配线,从而取消了传统应用的拖车及叉车等运输工具。20世纪80年代,伴随着与机器人技术密集相关的计算机、电子通信技术的飞速发展,国外掀起智能机器人研究热潮,其中各种具有广泛应用前景和军用价值的移动式机器人受到西方各国的普遍关注。
全国大学生智能汽车竞赛是在统一汽车模型平台上,使用飞思卡尔半导体公司的8位、16位微控制器作为核心控制模块,通过增加道路传感器、设计电机驱动电路、编写相应软件以及装配模型车,制作一个能够自主识别道路的模型汽车,按照规定路线行进,以完成时间最短者为优胜。该竞赛涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科交叉的大学生课外科技创意性比赛。
1.1.2 智能车的内容
本智能车系统采用MC9S12XS128 单片机作为控制核心。采用激光传感器检测路径信息,我们在进行方案比对分析后采用两个舵机分别对赛车转向进行控制及实现光电传感器的“摇头”控制。并采用欧姆龙旋转编码器对智能车速度进行检测,同时运用PID 算法实现赛车速度闭环控制。另外,智能车系统采用ST188 光电传感器检测坡道信息,使用辅助激光进行坡道上的路径检测和控制。我们在进行了大量的试验和改进后,调出了最适合小车的PID参数,提高了小车的路径识别和控制能力,取得了较好的效果。
1.2内容结构:
本文将从第二章到第七章对智能车的整体设计方案,机械结构,电路设计,软件设计和参数调整进行展开具体的描述;第八章为我们在小车制作过程中所获得的心得体会的总结和附录。
第二章 系统设计
2.1智能车系统总体结构:
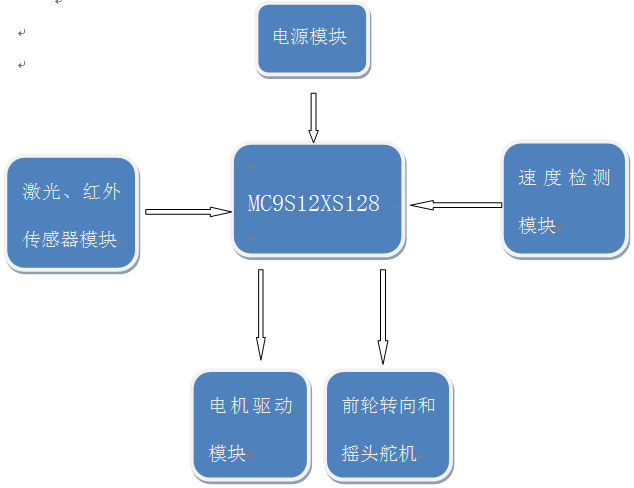
智能车包括的主要模块:MC9S12XS128主控模块、电源模块、电机驱动模块、舵机驱动、传感器模块和速度检测模块。
智能车系统总体结构如图2.1|
|
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

