
作者:中南大学 熊凯 邵明明 卢红海
指导教师:王击 徐德刚
作品简介
第一章 引言
1.1 背景介绍
全国大学生智能汽车竞赛是以智能汽车为竞赛平台的多学科专业交叉的创意性科技竞赛,是面向全国大学生的一种具有探索性的工程实践活动,该竞赛是在规定的模型汽车平台上,使用飞思卡尔半导体公司的8位、16位和32位微控制器作为核心控制模块,通过增加道路传感器、电机驱动电路以及编写相应软件,制作一个能够自主识别道路的模型汽车,按照规定路线行进,以完成时间最短者为优胜。
全国大学生智能汽车竞赛已成功举办了六届,得到了高校师生的高度评价,已发展成全国30个省市自治区170余所高校广泛参与的全国大学生智能汽车竞赛。已被教育部批准列入国家教学质量与教学改革工程资助项目中9个科技人文竞赛之一。该竞赛激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神。
1.2 整车设计思路
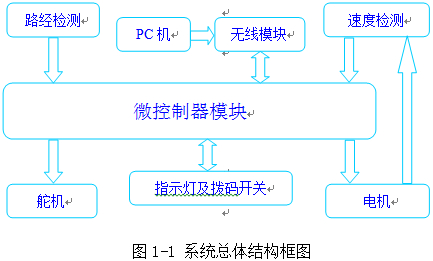
智能车竞赛要求设计一辆以组委会提供车模为主体的可以自主寻线的模型车,根据比赛规则和要求,本智能汽车采用光电方案,用650nm激光发射、180KHz接收模块作为路径检测传感器,飞卡尔公司32位微控制器MK60DN512[2]为系统控制核心,通过光电编码器检测速度,由微控制器通过数据处理得出赛道信息并根据当前情况给出舵机转角和电机转速,使智能车能在赛道上快速平稳的行驶。系统由电源模块、控制模块、激光传感器模块、测速模块、电机驱动模块、舵机模块、无线模块等组成。系统总体结构框图如图1-1。
1.3 文章结构
技术报告分七个章节:第一章节主要是对模型车设计制作的主要思路以及实现的技术方案概要说明,提出技术报告的行文框架。第二章介绍了赛车机械改造的总体思路,并详细说明了机械结构调整情况。第三章说明系统的硬件实现。第四章说明方向控制和速度控制算法设计。第五章介绍仿真和调试的方法。第六章是赛车的具体参数。第七章总结了整个制作过程中的创新点和不足之处,提出了下届备赛过程的努力方向。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

