
作者:厦门大学嘉庚学院 徐杰生 曾海涵 王明南
指导教师:廖康恺 吴天宝
作品简介
摘要
本文介绍一套直立智能车速度磁导航的设计,该智能车以COLDFIRE MCF52259作为整个系统信息处理和控制的核心。该系统通过3个方面进行控制。由陀螺仪ENC-03MB和加速度计MMA7361车体在直立过程中的信息,通过PID控制对智能小车直立进行控制;速度控制是由2个编码器对电机两端进行测速,将测得的速度与给定的速度进行PID速度闭环控制;由互感线圈采集赛道信息,得到多个互感线圈的信息值,通过PID的控制起到寻线方向控制。
第一章、引言
1.1概述
“飞思卡尔”杯全国大学生智能汽车竞赛是由教育部高等自动化专业教学指导分委员会主办的一项以智能汽车为研究对象的创意性科技竞赛,是面向全国大学生的一种具有探索性工程实践活动,是教育部倡导的大学生科技竞赛之一。该竞赛以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,旨在促进高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神,为优秀人才的脱颖而出创造条件。该竞赛以汽车电子为背景,涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科的科技创意性比赛。
比赛要求在大赛组委会统一提供的竞赛车模,我们选择了飞思卡尔32位微控制器COLDFIREMCF52259作为核心控制单元的基础上,自主构思控制方案及系统设计,包括传感器信号采集处理、控制算法及执行、动力电机驱动等,最终实现能够自主识别路线,并且可以实时输出车体状态的智能车控制硬件系统。
我们从一月份开始经过接近7个月的制作与调试,终于完成了目前的直立智能小车的制作。期间我们合作共勉,学习开发调试软件的使用、主控芯片控制、控制原理、编程语言等方面的知识,在对机械进行了调整的基础上,对小车软件进行调试,在发现问题后努力解决问题,进一步优化智能小车的机械、软件、和传感器的方案。
1.2整车设计思路
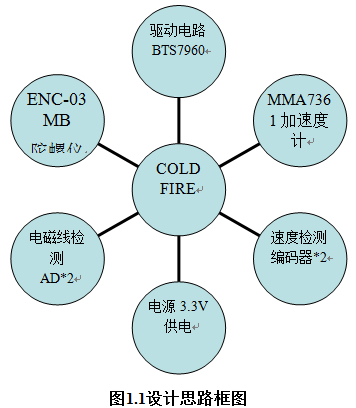
本车是主要运用COLDFIRE MUF52259为处理核心,本次竞赛中要求小车直立寻线走,直立、速度、方向控制对应同一个执行器(电机),要进行不同的控制,达到尽量解耦控制的效果。首先通过陀螺仪、加速度计传感器的信息处理输出相应的PWM波驱动电机,起到直立的效果。本次竞赛对速度和方向的要求非常高,所以我们用了左右两个编码器对左右轮进行测速,将得到的值与我们给定的速度进行比较,用过PID的简单闭环控制达到近似匀速的效果,在方向方面我们通过两个电感进行一字型摆放,通过兩电感的值通过简单的模糊控制,实现寻线的效果。具体的设计思路如下图1.1。
 全文请访问:电磁组 厦门大学嘉庚学院 电磁组 自强队 技术报告.doc。
全文请访问:电磁组 厦门大学嘉庚学院 电磁组 自强队 技术报告.doc。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

