
作者:同济大学 朱鹏 王法旭 吴海兵
指导教师:朱劲 张志明
作品简介
摘要
本设计以第七届飞思卡尔杯全国智能车大赛为背景,以大赛组委会指定的C型车模为平台,搭建了一个以飞思卡尔半导体公司的32位微控制器MK60DX256ZVLQ10为控制核心的智能车控制系统。以Keil 4.23为开发环境,利用基于微机械工艺MEMS的陀螺仪和加速度计实现了两轮小车稳定地自平衡,该小车系统还能有效地控制两轮小车的运动速度,实现自由地加速减速功能,自主地识别铺有100mA,20kHZ交流导线的赛道,并沿着赛道以尽可能快的速度运行。
该两轮自平衡小车系统显示了高度的智能化、人性化,并且具备良好的安全性、稳定性,可以为无人驾驶汽车的后续研究提供经验。
第一章 引言
1.1“飞思卡尔”杯智能车大赛介绍
本文以第七届“飞思卡尔”杯全国大学生智能汽车竞赛为背景,该比赛受教育部高等教育司委托(教高司函[2005]201号文,附件1),由教育部高等自动化专业教学指导分委员会(以下简称自动化分教指委)主办全国大学生智能汽车竞赛。该竞赛以智能汽车为研究对象的创意性科技竞赛,是面向全国大学生的一种具有探索性工程实践活动,是教育部倡导的大学生科技竞赛之一,为加强大学生实践、创新能力和团队精神的培养,促进高等教育教学改革。该竞赛以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,旨在促进高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神,为优秀人才的脱颖而出创造条件。
该竞赛由竞赛秘书处为各参赛队提供/购置规定范围内的标准硬软件技术平台,竞赛过程包括理论设计、实际制作、整车调试、现场比赛等环节,要求学生组成团队,协同工作,初步体会一个工程性的研究开发项目从设计到实现的全过程。该竞赛融科学性、趣味性和观赏性为一体,是以迅猛发展、前景广阔的汽车电子为背景,涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械与汽车等多学科专业的创意性比赛。该竞赛规则透明,评价标准客观,坚持公开、公平、公正的原则,保证竞赛向健康、普及,持续的方向发展。
该竞赛以飞思卡尔半导体公司为协办方,得到了教育部相关领导、飞思卡尔公司领导与各高校师生的高度评价,已发展成全国30个省市自治区近300所高校广泛参与的全国大学生智能汽车竞赛。2008年起被教育部批准列入国家教学质量与教学改革工程资助项目中科技人文竞赛之一(教高函[2007]30号文)。
1.2 第七届智能车大赛规则介绍
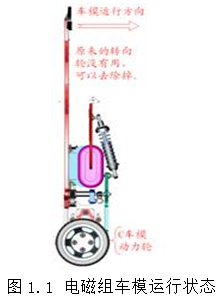
电磁组要求车模直立行走,使用C型车模。车模运行时只允许动力轮着地,车模直立行走。如下图所示:
全文请访问:电磁组 同济大学_tj-金戈队技术报告(电磁).pdf。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

