
作者:湖南大学 林文建 张海焕 许佳航
指导教师:王绍源 王耀南
作品简介
第一章 引言
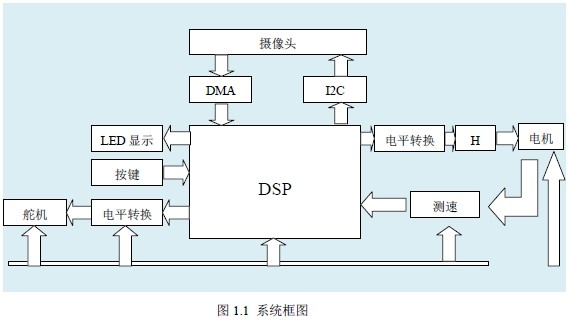
本智能汽车车模是为参加第五届“飞思卡尔”杯全国大学生智能车邀请赛而设计制作的。本设计使用飞思卡尔公司十六位DSP56858 为核心控制处理器,通过CMOS 摄像头采集道路信息,经过DSP 处理,得到跑道的连续性,有效性和有效的小车位置信息,通过PID 算法控制智能小车的转向和速度。同时设计了编码器对电机速度检测系统,实现了速度的闭环控制。为了提高小车的速度,本文采用专用电机驱动芯片设计了H 桥电机驱动电路。采用串口将运行数据传回PC 并用MATLAB 处理。系统总体设计框图如图1.1 所示。
本技术报告整体架构如下:
首先我们在引言中对车模制作情况进行概述,第二章介绍系统硬件的设计,主要包括传感器的选择和安装、电机驱动、电路设计安装等内容。第三章介绍系统软件设计,主要包括车模信号处理和整个控制算法的思路。第四章介绍小车的调试。在最后一章我们对工作中所遇到的问题进行了分析,并对车模制作的整体情况进行总结。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

