
作者:安徽工程大学 方海贞 盛双 朱灿
指导教师:方海贞 盛双
作品简介
第一章 引言
1.1 概述
“飞思卡尔”杯全国大学生智能汽车竞赛,是由教育部高等学校自动化专业教学指导分委员会主办的科技竞赛。该竞赛以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,旨在促进高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神。该竞赛主要由飞思卡尔半导体公司赞助,由清华大学协办,从2006 年开始,每年举办一届,目前已成功举办六届。此赛事被教育部批准列入国家教学质量与教学改革工程资助项目之一。
比赛按照识别路线方案分成摄像头组、光电组和电磁组。通过采集道路图像信息进行路径检测的车模属于摄像头组;通过采集道路少数离散点反射亮度进行路径检测的车模属于光电组;通过感应由道路中心电线产生的交变磁场进行路径检测的车模属于电磁组。其中摄像头组和光电组是历届常规项目,电磁组是第五届新设立的比赛项目。
本技术报告将针对传感器信号处理设计、安装、底盘参数选择、电路设计、控制算法、调试手段等方面进行阐述,并列出了模型车的主要技术参数。
1.2 电磁车体系结构
按照比赛规则要求,赛车通过检测载流导线周围的交变电磁场信号来控制车模沿着载流导线前进。在赛道的起跑线处装有永磁铁,标志起跑线的位置,赛车在行驶一圈后需在起跑线处停车。
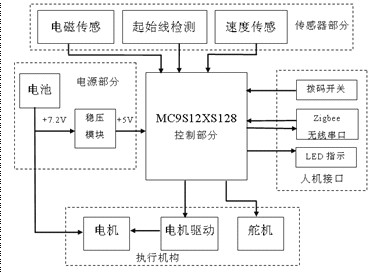
图1.1 电磁车结构图
电磁车结构如图1-1。电磁车体系结构大致包括传感器、控制中心、执行机构、人机接口和电源五大部分。各部分功能介绍如下:
1.传感器
负责感知外部世界的环境信息和车模自身的状态信息,为小车完成赛道的检测与跟踪以及实现小车的运动控制提供所需的信息。传感器部分包括电磁传感器、起始线检测传感器(干簧管)和速度传感器(编码器)三个子模块。
2.控制中心
分析传感器数据,提取赛道信息,运行控制算法,向执行机构发出动作信号,控制赛车沿赛道行驶。控制部分主体是飞思卡尔半导体公司推出的16 位单片机MC9S12XS128。
3.执行机构
负责执行动作信号,实现车的前进、变速和转向。执行机构包括电机驱动、电机和舵机。
4.人机接口
实现运行/调试模式和速度/PID 参数选择、状态指示、实时监控等人机交互功能,包括拨码开关、LED、Zigbee 无线模块。其中Zigbee 无线模块仅用于赛前调试。
5.电源部分
负责向各部分提供合适的电源。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

