
作者:山东理工大学 夏国栋 邵振超 张建
指导教师:万隆 巴奉丽
作品简介
③PC机接收:蓝牙接收端、PC机。
功能与使用说明:
1、本系统不依赖卫星导航系统,以一个初始点为原点,实时记录和显示在室内行动的轨迹。每隔200ms以(X,Y,Z)格式记录一个当前所处坐标位置。同时记录采样数据的日期和时间和温度。能够记录的数据点数不小于1000点。
2、通过800*480分辨率的LCD显示所经过的三维轨迹。显示轨迹与运动性状基本一致。实时显示当前的日期、时间、坐标、速度、温度、所经过路径的长度,以及从出发开始所经过的时间、气压和电子罗盘数据。
3、通过蓝牙通信,在PC机上显示速度、温度、气压、电子罗盘数据。
4、数据能够以“三维坐标、日期、时间、温度、速度、路程、气压”形式直接写入SD卡,并能够从PC直接读取。

作品特色:
一、先进性
本作品在惯性导航技术原理上以比较先进的九轴传感器为核心,九轴传感器技术是基于系统微型化、集成化来探索具有新原理、新功能的元件和系统的MEMS技术。具有体积小、功耗低、性能稳定等优点。
二、实用性
不依赖于GPS等限制条件,室内路径记录仪能够记录、跟踪无线接收范围内的详细路径数据温度、大气压。并且仅以电池供电。
三、创新性
采用现在集成度较高的九轴传感器,利用惯性导航技术,实现多方通信,使惯导技术和九轴传感器更加广泛应用。
平台选型说明
选用单片机开发板以IAP15F2K61S2芯片为控制核心。
设计说明
一、设计原理
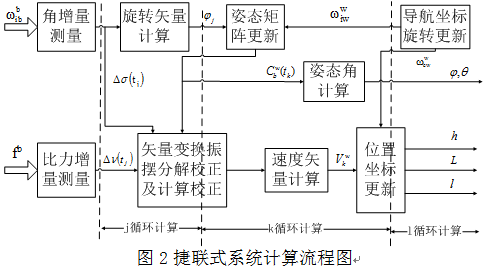
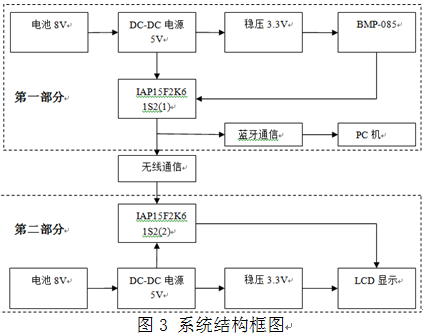
室内路径记录仪是以IAP15F2K6S2单片机为核心,利用九轴传感器和惯导技术不断采集运载体的运动数据,一方面通过无线通信将数据发送到系统显示,能够直接写入SD卡,一方面利用蓝牙将数据发送到PC机。系统采用捷联式计算方法,捷联式系统将传感器直接安装在运载体上,以测量运载体相对三个正交的角运动和线运动。陀螺仪不是在物理上形成参考坐标系,而是将陀螺仪的输出经过解析计算得到系统的初始状态和当前状态之间的相对方向角,从而定义适当的参考坐标系。所有惯性导航系统都需要根据加速度计输出的比力适量结算导航方程,以获得运载体的速度和位置。基于捷联式惯性测量组合直接测量运载体坐标系中的比力矢量 和角速度矢量 ,图中为了保证旋转矢量和振摆运动速度增量的计算精度,采用了高速j循环计算速率,其中包括转角测量、比力测量、旋转矢量更新,以及振摆运动速度矢量校正。中速k循环用来计算姿态更新、速度增量分解及校正、速度矢量更新及位置更新。低速l循环用作导航坐标旋转更新。解算导航参数的流程如图2所示。
二、设计方案
1、电源:考虑系统的功耗性及便携性,系统采用电池供电,用7805 稳压芯片稳压到5V,为单片机供电,然后再使用AMS1117-3.3V将5V稳压成3.3V,为传感器、通信模块、LCD显示屏供电。并且系统的两部分单独供电。
2、传感器:采用集成的九轴传感器,BMP-085九轴模块是由三轴加速度、三轴陀螺仪、三轴磁场、气压包含运动感测芯片,整合了三轴陀螺仪与三轴加速度于单一硅芯片上,是一个高性能、综合性、稳定性好的传感器模块,包含了数码运动处理器,可进行复杂的九轴感测组件融合演算。BMP-085是通过IIC与单片机通信,只需EX_SCL、EX_SDA两条数据线即可。
3、显示器选择:采用800*480分辨率的彩屏,能够清晰的显示出运动轨迹,并且能够在同一界面上显示出记录的数据。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

