
作者:滨州学院计算机科学技术系 张诗林 张君 周建
指导教师:赵春波
作品简介
三、结构说明

平台选型说明
选用STC公司的IAP15F2K60S2单片机为主控芯片,不需要外部晶振和复位电路,工作稳定。
设计说明
一、原理图
二、设计原理
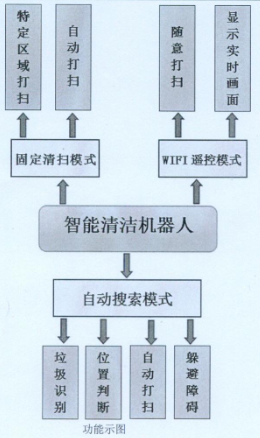
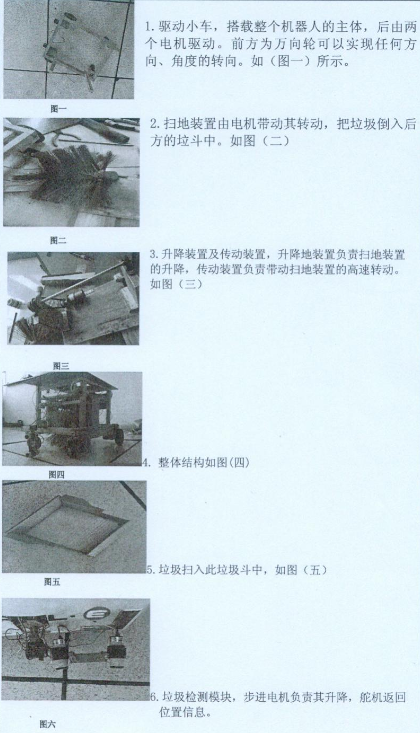
1、机器人的机械部分主要由驱动小车、升降装置、传动装置、扫地装置、垃圾斗、垃圾桶构成。驱动小车负责机器人的移动,整个系统搭载在小车上,小车采用后轮驱动,由两个12V的直流减速电机来提供动力,前轮为两个万向轮,当两个后轮驱动电机同时向前转动时机器人前进,同时向后转动时机器人后退,左轮向前转动右轮向后转动实现右转,右轮向前转动左轮向后转动实现左转;传动装置和扫地装置按装在升降装置之上,传动装置由电机、同步轮和同步带构成,带动扫地装置的旋转,扫地装置时由毛刷做成的圆柱形的滚轮;垃圾斗固定在扫地装置的后方,扫地装置通过旋转把垃圾扫入垃圾斗;机器人上方背有垃圾桶,工作在任意一种模式下机器人都可供人们投放垃圾。804002
2、机器人采用STC89C52RC单片机对整个系统进行控制,主要模块有垃圾识别模块、L298N电机驱动模块、操作面板、语音模块、路由器、环境监测模块、7805稳压芯片、壁障模块等。垃圾识别模块由5V步进电机、舵机和两个光电传感器组成,步进电机负责整个垃圾识别模块的升降,舵机上固定两个光电传感器,当两个传感器同时检测到信号时判断为非垃圾你进行处理,当下方的传感器检测到信号时且上方的传感器没检测到信号时判断为垃圾,这时垃圾识别装置停止工作,由步进电机升起,进行清扫;L298N电机驱动模块主要对各个12V电机进行驱动控制;操作面板由一个电源开关、四个按键和一个12864液晶显示屏构成,四个按键分别是复位键、工作模式一选择键、工作模式二选择键和工作模式三选择键,复位键负责让机器人进入初始状态,可以实现当前任意模式的退出,三个模式选择键分别代表三个工作模式,按下相应的按键机器人执行相应的工作,12864液晶显示屏会对当前的温度和湿度进行实时的显示;语音模块进行语音提示,按下相应的模式选择键时会提示相应的功能启动,若扫描到垃圾会提示“发现目标”,若遇到障碍会发出“遇到障碍”的语音;路由器通过WiFi与移动终端或电脑相连接负责对机器人进行遥控,并通过摄像头传输实时画面到移动终端或电脑;环境检测模块主要对温湿度进行检测,并把信息显示在12864液晶上;7805稳压芯片实现12V到5V电压的转换,为各种电子元器件进行供电;壁障模块识别障碍物,让机器人在自由搜素模式下及时躲避障碍。
三、功能展示
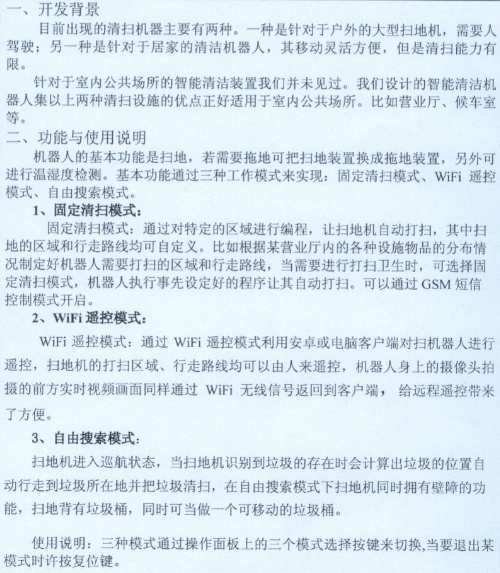
1、固定清扫模式:通过对特定的区域进行编程,让扫地机自动打扫,其中扫地的区域和行走路线均可自定义。比如根据某营业厅内的各种设施物品的分布情况制定好机器人需要打扫的区域和行走路线,当需要进行打扫卫生时,可选择固定清扫模式,机器人执行事先设定好的程序让其自动打扫。
2、WiFi遥控模式:通过WiFi遥控模式利用安卓或电脑客户端对扫机器人进行遥控,扫地机的打扫区域、行走路线均可以由人来遥控,机器人身上的摄像头拍摄的前方实时视频画面同样通过WiFi无线信号返回到客户端,给远程遥控带来了方便。
3、自由搜索模式:扫地机进入巡航状态,当扫地机识别到垃圾的存在时会计算出垃圾的位置自动行走到垃圾所在地并把垃圾清扫,在自由搜索模式下扫地机同时拥有壁障的功能,扫地背有垃圾桶,同时可当做一个可移动的垃圾桶。
四、创新之处
1、设计并制作出了一款适用于室内公共场所打扫卫生的机器人,各大营业厅、候车室等的卫生打扫带来方便。
2、体积适中,移动灵活。
3、智能搜索、垃圾识别、无线遥控给打扫卫生带来了方便的同时怎加了乐趣。
4、机器人身上背有垃圾桶,瞬间变成一个可移动的垃圾桶。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

