
作者:西藏大学 张正桥 代森 梅卫龙
指导教师:武强 陈延利
作品简介
开发背景:
垃圾桶的设立在方便广大群众的同时,美化了街道,更是某个地区文明发展的体现,也减少了清洁工人力的投入,所以垃圾桶对现代化城市生活起到了重要作用。但传统的垃圾桶容量不能有效利用,需要频繁清洁;并且功能单一。因此,我们设计了这么一个新能源下多功能电子垃圾桶。
结构说明:
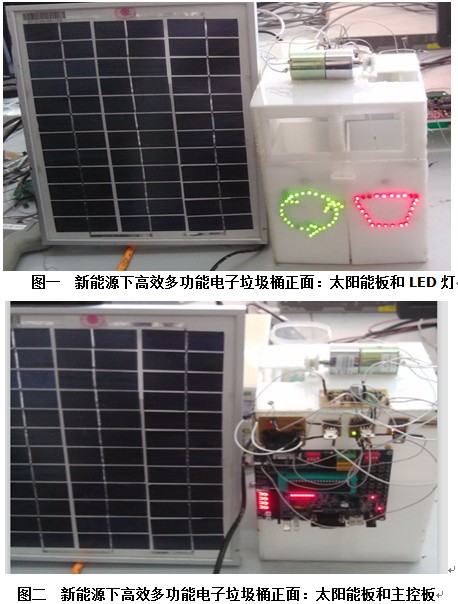
该作品一共有四部分组成,包括太阳能电池板及蓄电池电源模块、主控板及外围控制电路、LED照明灯、压缩电机等部分。
功能和使用说明:
1. 智能压缩功能
本垃圾桶仿照普通垃圾桶,设计了可回收和不可回收两个分箱。通过主控板控制电机,电机带动压缩器械,实现定时对箱内垃圾进行压缩,以提高垃圾桶容量利用率。
2. 路灯照明功能
本垃圾桶在桶正面上镶嵌了高亮节能LED灯,一方面,以此作为可回收和不可回收指示;另一方面,我们通过光敏电阻感应光线强度,当光线很暗时,它就会自动点亮,起到照明功能。
3. 应急充电功能
我们在垃圾桶的侧面设计了一个USB充电接口。当行人和游客手机、MP3等电子设备没有电时,便可以利用此接口及时充电,这就解决了路人的充电需求。
4. 太阳能供电功能
本作品整体采用太阳能电池板供电,环保低碳。
作品特色:
本作品是对传统垃圾桶的一个升级,通过利用最新电子信息技术,实现了多功能电子垃圾桶的设计。
平台选型说明
该作品选用单片机开发板(以IAP15F2K61S2芯片为控制核心)。
设计说明
一、设计原理
现有的垃圾桶空间有限,包装袋,烟盒,废纸,碎布等垃圾占用太大空间回收起来麻烦,回收次数频繁。因此,本作品采用单片机结合电机控制实现包装袋,烟盒,废纸,碎布等垃圾的压缩。另外,垃圾桶结构、颜色、外观也进行了全新的设计理念改造:结构新颖;颜色醒目;外观美观;投掷口设置挡板等。
二、设计方案
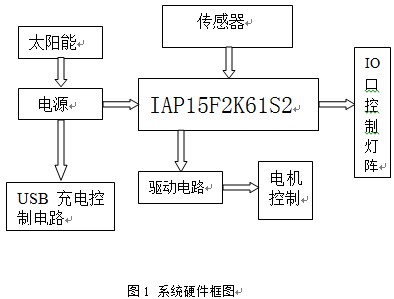
图1为系统硬件结构框图,主控芯片采用IAP15F2K61S2微处理器,同时,采用太阳能发电装置,节省能源消耗。电机控制垃圾的压缩,以单片机为核心实现各个功能。
三、硬件电路设计
硬件电路包括太阳能充放电电路,LED显示电路、USB控制电路、电机驱动电路等。
1、主充电回路
太阳能主充电回路如图2所示。J1为太阳能电池板接入端子整个系统的主控单片机工作于5.0V电压下,控制电路工作6.0V电压,由蓄电池提供。
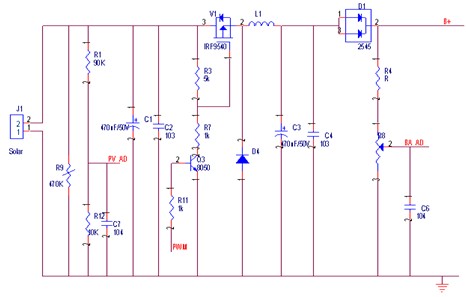
图2 充电回路原理图
由上所述,J1接入太阳能电池板,整个主回路的充电则必须通过MOS管V1 à L1 à D1(2545) à F1(RF30) à J10(Battary) à R14 à ⊥ 形成充电回路,而整个充电的核心就是对MOS管V1的控制,而由R11,Q3(8050),R7,R3以及MOS管IRF9540构成的电路网路是实现对MOS管V1控制的关键。
不难看出,在NPN三极管的基极通过R11与PWM(脉冲宽度调制)相连接,而该PWM波则是通过SPCE061A主控板输出控制信号。当PWM输出为低电平时,此时,NPN三极管Q3的主回路处于截止状态,由此可以判断,MOS管V1的1号脚和3号脚电位相等,MOS管处于截止状态,此时,太阳能电池板与蓄电池的充电回路等价于开路状态;当PWM输出为高电平时,Q3导通,此时,太阳能电池板正极àR3àR7àQ3à⊥形成回路,由于R3的分压作用,使得MOS管导通,充电主回路导通,蓄电池则处于充电状态。
整个电路控制的核心则是PWM波对MOS管导通截止的控制,本项目的设计采用的是三段式充电方法,而主控芯片IAP15F2K61S2具备PWM输出功能,保证了本系统实现三段式充电算法,从而有效地保护蓄电池。
2、放电控制工作过程
当需要放电时,系统通过AD通道采样当前电池的正负极之间的电压值和预先设置的最低输出电压值(若没有预先设置值,则系统会使用默认值5.5V电压)进行比较,若高于最低输出电压值,正常输出,点亮正常输出状态指示灯;否则,闪烁低电位状态指示灯,
3、LED显示电路
本项目采用LED实时的显示充电系统的状态,电池电量不足指示(红灯亮)以及垃圾桶损坏(该功能需要启动自动检测垃圾桶状态的功能,如果出现异常,则对应的红色灯亮)等,绿色灯亮只是垃圾桶工作状态良好,其电路原理图如图3所示:
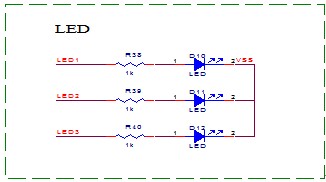
图3 LED状态指示灯电路图
4、电源变换部分电路原理分析
电源变换部分采用的是三端集成稳压器来实现的,具体电路如图4所示,使用了7805变换得到稳定的直流5V输出,同时,由D8和R19组成了电源指示电路来显示当前系统的供电是否正常。J3的端子为IAP15F2K61S2主控板提供电源,B+为蓄电池电源引入端子。
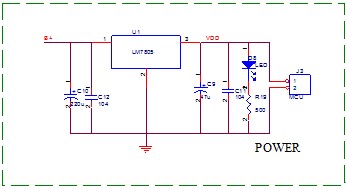
图4 电源变换部分电路图
5、电机驱动电路
电机驱动电路通过IAP15F2K61S2产生的PWM波控制ZYT永磁直流减速电机实现垃圾的智能压缩。驱动芯片L298是驱动二相和四相步进电机的专用芯片,我们利用它内部的桥式电路来驱动直流电机,这种方法有一系列的优点。每一组PWM波用来控制一个电机的速度,而另外两个I/O口可以控制电机的正反转,控制比较简单,电路也很简单,一个芯片内包含有8个功率管,这样简化了电路的复杂性,电机驱动电路如图5所示。
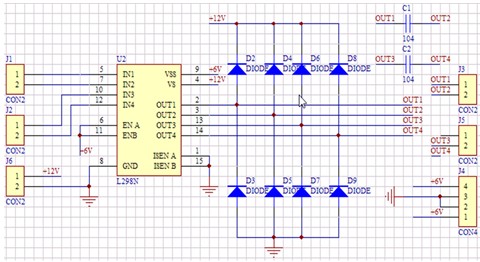
图5 电机驱动电路
PWM输出波形和计算
电动机的电枢绕组两端的电压平均值U为:
U =(t1×U)/(t1+t2) =( t1×U)/T=D*U ,式中D为占空比,D= t/T。
占空比D表示了在一个周期T里开关管导通的时间与周期的比值。D的变化范围为0≤D≤1。当电源电压U不变的情况下,输出电压的平均值U取决于占空比D的大小,改变D值也就改变了输出电压的平均值,从而达到控制电动机转速的目的,即实现PWM调速。
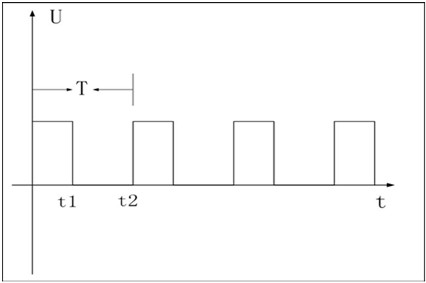
图6 PWM调速
在PWM调速时,占空比D是一个重要参数。改变占空比的方法有定宽调频法、调宽调频法和定频调宽法等。常用的定频调宽法,同时改变t1和t2,但周期T(或频率)保持不变,如图6所示。
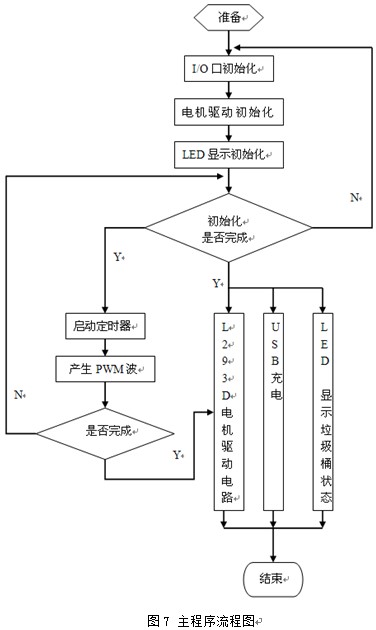
四、软件设计
软件主程序流程图如图7所示。
此文档的相关视频来自:http://v.eepw.com.cn/video/play/id/13415
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

