
作者:齐鲁工业大学 曹放 于倩祥 熊伟
指导教师:王佐勋
作品简介

开发背景:
由于现在自然灾害频发,特别是地震等灾害,人力比较难救援。在人无法进人的狭小空间,特殊危险环境下,代替人大范围搜寻受伤人员,节约人力,物力。智能救援机器人可以有效地解决这些问题。
结构说明:
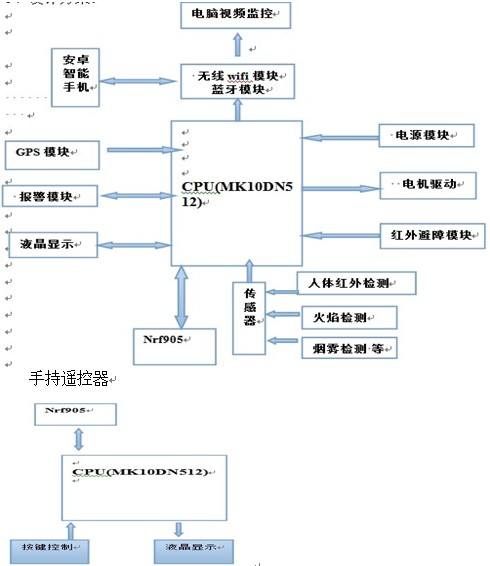
本设计由智能救援机器人,电脑视频监控端,遥控部分组成。遥控部分又分为手机安卓客户端遥控和手持遥控器遥控,通过按键遥控可设置机器人的两种工作模式:自动模式和手动模式,同时显示GPS位置。
智能救援机器人
功能和使用说明:
1、电脑实时视频监控功能:
智能救援机器人可以通过自带的摄像头采集视频图像,并通过wifi发送到电脑上。在人无法进入的狭小空间或者危险环境下,实时发现周围需要救援的人。
2、安卓手机控制功能
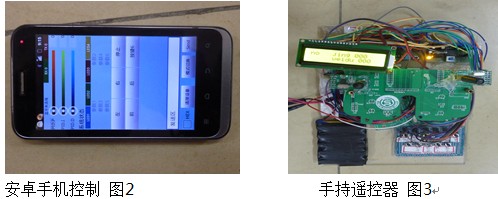
智能救援机器人的运行有三种控制方式,一:手机安卓客户端通过WIFI与小车相连,对机器人进行遥控。二:手持遥控器手动控制。三:自动搜寻。同时可以控制机器人机械臂,快速救人。

3 GPS定位功能

机器人上带有GPS定位模块,可以通过无线将自己的位置信息传到手持遥控器上。
4 实时的环境监测
智能救援机器人自带丰富的传感器。有煤气甲烷探测器,人体红外模块,火焰探测器,烟雾探测器,光强探测器等。可以检测到有人,煤气甲烷,烟雾火焰,并可以迅速报警。
5 夜间模式
自带有光强检测模块,当检测到亮度不够时,可以自动打开补光灯,在夜间也可以正常工作。
作品特色:
1、 Wifi传输图像,救援人员可以通过电脑上面的图像采集户端,观察人无法到达的狭小空间或者危险地的具体情况。
2、 手机安卓遥控。
3、 GPS定位。
4、 自动搜索需救援人员,自身携带丰富的传感器,并能实时报警。
5、 夜间可以工作。
机械手,可以帮助救援人员在险恶的环境中清除障碍物,清除危险品,可以将货物搬动到指定地点等。
平台选型说明
该作品选用ARM嵌入式开发板(以MK10DN512芯片为控制核心)
设计说明
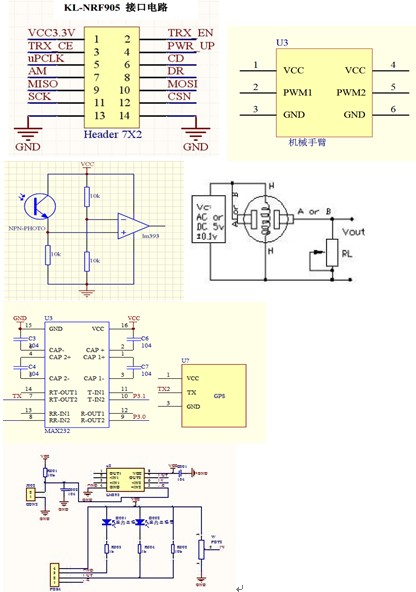
1、电路原理图:
2、设计原理:
由于现在自然灾害频发,特别是地震等灾害,人力比较难救援。在人无法进人的狭小空间,特殊危险环境下,代替人大范围搜寻受伤人员,节约人力,物力。智能救援机器人可以有效地解决这些问题。
防灾、减灾和救灾事关人民生命和财产安全,是国家公共安全的重要组成部分。救援机器人技术是国家发展迫切需要的战略必争的核心技术之一,将在国民经济和安全中起着重要作用并具有重大的战略意义。救援机器人研究逐步从试验研究转入到实际应用,多种技术融合化、多智能体网络化是今后救援机器人研究的发展方向。
本设计由智能救援机器人,电脑视频监控端,遥控部分组成。遥控部分又分为手机安卓客户端遥控和手持遥控器遥控,通过按键遥控可设置机器人的两种工作模式:自动模式和手动模式,同时显示GPS位置。
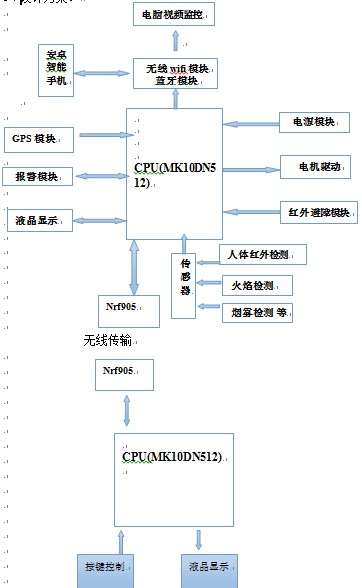
一 控制器
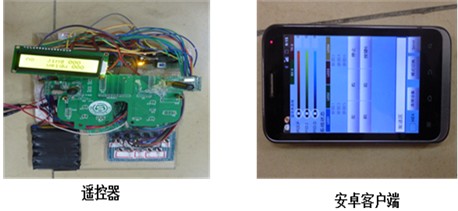
可设置手动和自动模式,手动模式又可分为按键控制和手机安卓客户端控制,可控制机器人前进、后退、左转、右转和机械手抓取、放开物品。并在k60的液晶上显示每一步的动作。
二 通信模块
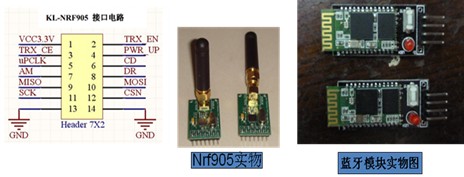
无线信息传输采用nRF905、蓝牙模块、wifi通信,负责机器人和遥控器之间的通信。
三 机械手臂
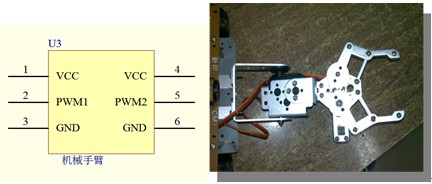
通过单片机的PWM信号控制,机械手臂有4 个自由度,可以实现物品抓取、放置,排除障碍物,抢救珍贵物品等。
四 避障模块
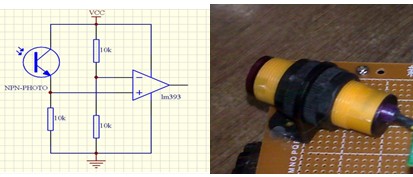
机器人在自动模式下通过避障模块判断前、左、右是否有障碍物,来作为依据进行相应的转弯操作。
五 传感器报警模块
智能救援机器人自带丰富的传感器。有煤气甲烷探测器,人体红外模块,火焰探测器,烟雾探测器,光强探测器等。可以检测到有人,煤气甲烷,烟雾火焰,并可以迅速报警。
3、设计方案:
此文档的相关视频来自:http://v.eepw.com.cn/video/play/id/13519
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

