
作者:西南大学计算机与信息科学学院 牟书娟 史智慧
指导教师:刘枫 张渝
作品简介
开发背景:
随着社会与国家的不断发展,我们的生活水平不断提高,在经济迅速增长的同时,我们的安全意识在逐渐增加。而近几年来,各种危险场所不可避免的火灾频繁出现,给社会安全造成了极大的隐患,于是,发生火灾时的及时补救就成为迫在眉睫需要解决的问题,救火早一分就少一分的损失,这一举措不仅为国家也为市民。消防救援人员固然速度很快,但从消防队出发到达火灾地点也需要一段不小的时间,到达火灾现场后的勘察地形和实行相应的救火措施,同样需要一段时间,并且,贸然进入救火现场还有一定的生命危险。结合上述问题,诞生了自动勘测温度、自主循迹进行灭火的无人智能消防车的理念。在无人智能消防车中用ARM来代替人的思考,实现自动化控制,简化了灭火流程,节省了不必要的支出,并降低了危险。
结构说明:
电源模块(小车电机电源模块、单片机电源模块、无线电源模块)、电机驱动模块、循迹模块、避障模块、无线模块、温度传感模块、风扇模块。
功能与使用说明:
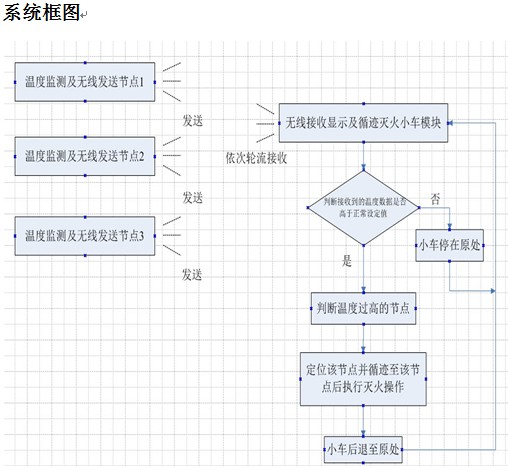
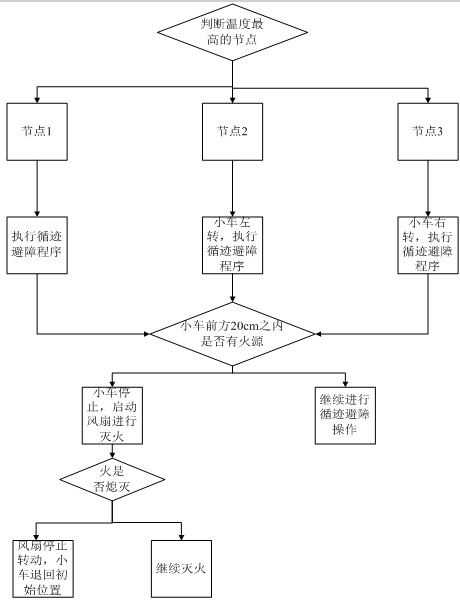
分别设置3个温度监测点,ARM芯片自动检测3个点中的温度最高点,小车自动通过 “循迹”走向该点位置,利用超声波壁障在距离该监测点20厘米处停下,停止后,启动风扇旋转,给该点降温(这里在温度最高点设置的是燃烧的蜡烛);蜡烛熄灭后,小车自动退回至初始位置。
作品特色:
自动监测设置点的温度,通过无线传输,收到温度值后,进行判别,并执行循迹、避障、灭火一体的动作,完全达到智能化。
平台选型说明
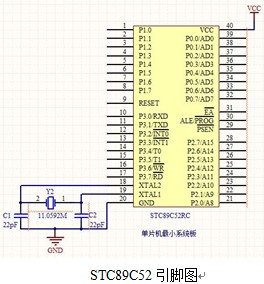
芯片:飞思卡尔公司的cortexM4系列、STC89C52
电源:2节充电锂电池和多节干电池
电机驱动模块:L9110
超声波模块:超声波测距HC-SR04
红外探测模块:利用红外探测、寻迹光电传感器
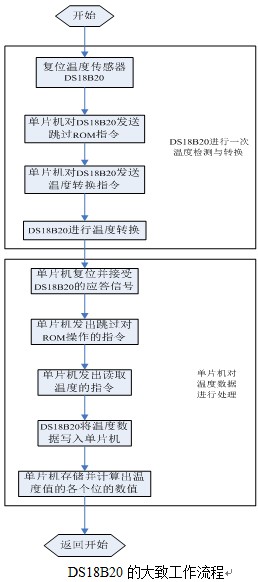
温度传感器:DS18B20
无线模块:CC1101
液晶显示屏:LCD1602
设计说明
电源系统设计方案:
采用4节1.5V的干电池为ARM芯片供电,电压达到6V;采用2节18650充电电池为电机供电,电压达到7V;无线模块CC1101的电源为3.3V,因此采用5V输入3.3V输出的器件AMS1117,将3.3V输出引脚和GND分别连接到无线模块的3.3V引脚和GND即可为无线模块供电。

车体方案设计:
前轮为万向轮转向,车体制定左右两轮分别驱动,即车体前轮安装一个万向轮,左右两轮分别用两个转速和力矩基本完全相同的直流减速电机进行驱动。在安装时,需要保证两个驱动电机同轴,当小车前进时,左右两个驱动轮和前面的万向轮就形成了三点结构,基于三角形是稳定的,所以,这种结构使得小车可以平稳行驶,并避免出现后轮过低而使左右两驱动轮驱动力不够的情况。为了防止小车重心的偏移,前万向轮起了支撑的作用。
驱动电机系统方案设计:
驱动模块:用芯片L9110作为电机驱动芯片,用该芯片同时控制两个电机。L9110 是为控制和驱动电机设计的两通道推挽式功率放大专用集成电路器件,将分立电路集成在单片IC 之中,使外围器件成本降低,整机可靠性提高。该芯片有两个TTL/CMOS兼容电平的输入,具有良好的抗干扰性;两个输出端能直接驱动电机的正反向运动,它具有较大的电流驱动能力;同时它具有较低的输出饱和压降;内置的钳位二极管能释放感性负载的反向冲击电流,使它在驱动继电器、直流电机、步进电机或开关功率管的使用上安全可靠。
设计方案:采用驱动模块L9110与ARM芯片通过引脚连接,通过ARM的IO口和该模块的四路输出控制左右两轮的正反转:A-IB控制右轮前转,A-IA控制左轮后转,B-IB控制右轮前转,B-IA控制左轮后转。当小车前进时,使能A-IB与B-IB;当小车向左转时,使能A-IB;当小车向右转时,使能B-IB;当小车后退时,使能A-IA与B-IA;当小车停止时,使能A-IA、A-IB、B-IA、B-IB。

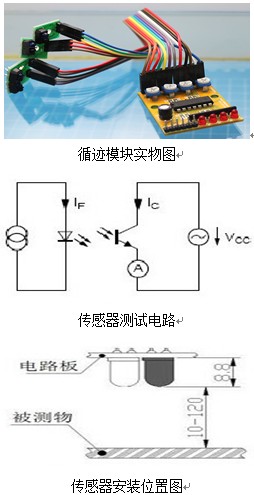
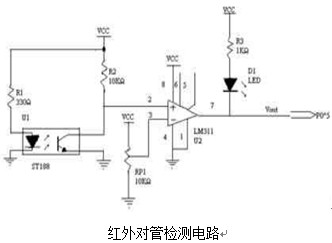
红外循迹方案设计:
循迹模块:采用循迹避障模块,利用红外探测、寻迹光电传感器来进行黑白线的识别。使用红外线发射和接收管等分立元器件组成探头,并使用LM339电压比较器做为核心器件构成中控电路,其中加入了迟滞电路,使其工作更加稳定。
设计方案:在小车底座三个轮子处分别安装单路的红外循迹模块,实现三路循迹,前轮的红外输出为hw_out1,左轮的红外输出为hw_out2;右轮的红外输出为hw_out3;其中检测的黑线时信号为高电平,LED灯灭,检测到白线时信号为低电平,LED灯亮。结合三轮的红外输出结果,进行情况分析如下:前轮检测到黑线,而左右两轮检测到白线,小车前进;只有左轮检测到黑线、左右两轮同时检测到黑线或前轮和左轮检测到黑线时,小车左转;只有右轮检测到黑线、或前轮和右轮检测到黑线时,小车右转;其余的情况使得小车停止。
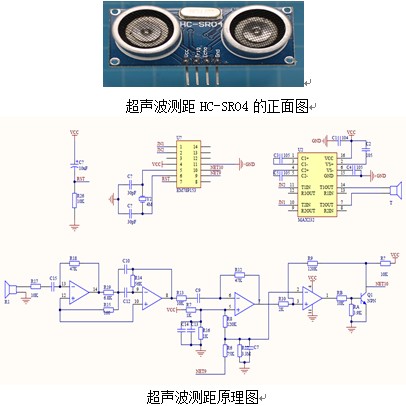
超声波避障方案设计:
超声波避障模块:HC-SR04超声波测距模块可提供2cm-400cm的非接触式距离感测功能,测距精度可高达3mm;模块包括超声波发射器、接收器与控制电路。
模块工作原理:
(1)采用IO触发测距,给至少10us的高电平信号;
(2)模块自动发送8个40khz的方波,自动检测是否有信号返回;
(3)有信号返回,通过IO输出一高电平,高电平持续的时间就是超声波从发射到返回的时间.测试距离=(高电平时间*声速(340M/S))/2;
设计方案:从小车启动并进入循迹灭火阶段时,启动了避障功能,使得距离火源20cm处停下,方便风扇吹风达到灭火的效果。
风扇模块方案设计:
当小车循迹至温度最高点处时,利用超声波避障,在距离蜡烛20cm处停下,停止后,通过IO口使能风扇,使得风扇旋转,当蜡烛熄灭后,风扇停止旋转,小车退回至初始位置。
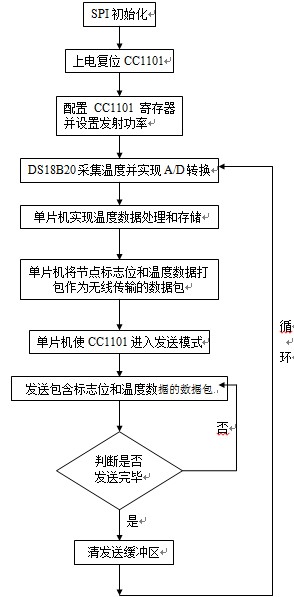
小车循迹灭火流程图
温度采集及无线发送端电路设计:

温度采集及无线发送端包含STC89C52RC单片机模块、数字式温度传感器模块DS18B20、无线收发器模块CC1101、3.3V无线电源模块AMS1117。
此文档的相关视频来自:http://v.eepw.com.cn/video/play/id/13534






 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

