
作者:武汉东湖学院 罗健 卢潇 鲁国智
指导老师:雷娟 左小琼
作品简介:

平台选型说明:
本小车系统主要基于一片IAP15F2K61S2单片机实现功能。整个系统可分为四个部分,核心控制部分、信息探测部分、动作执行部分和辅助部分。
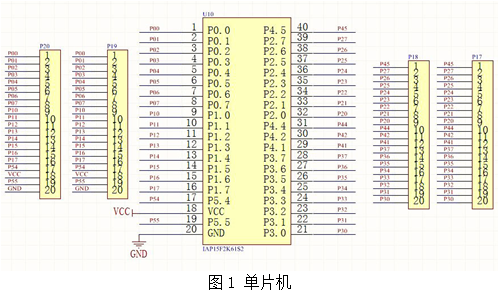
一、核心控制部分:
本部分是一片IAP15F2K61S2单片机,它是本系统的核心控制中心,一方面接收用户发送来的指令,另一方面控制执行机构完成用户选择的功能。
二、信息探测部分:
本部分选用了BLK-MD-BC04-B蓝牙模块、HC-SR04超声波、SG-9G伺服电机、RPR220红外光电对管循迹模块。
(1)BLK-MD-BC04-B蓝牙模块 用户和小车交互的接口。
(2)HC-SR04超声波 负责检测目标物体。
(3) SG-9G伺服电机 承载超声波多角度检测
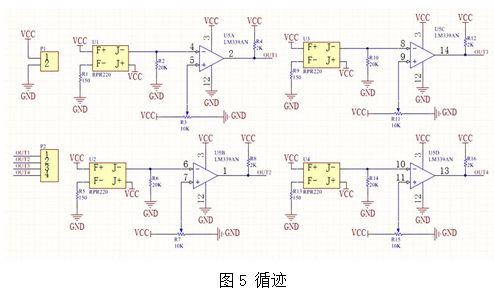
(4)RPR220红外光电对管循迹模块 检测小车与循迹跑道的相对位置
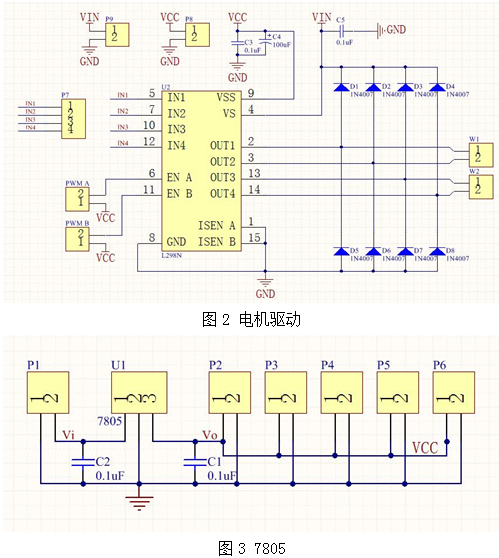
三、动作执行部分:
本部分采用了一个直流电机驱动模块和两个直流电机。执行单片机发送来的动作指令。
(1)直流电机驱动模块
选用L289N芯片作为主要的驱动芯片,负责执行单片机发来的PWM信号,驱动直流电机运行。
(2)直流电机
选用两个5V带减速装置的直流电机。接收直流驱动模块发来的驱动信号,并做出相应的动作。
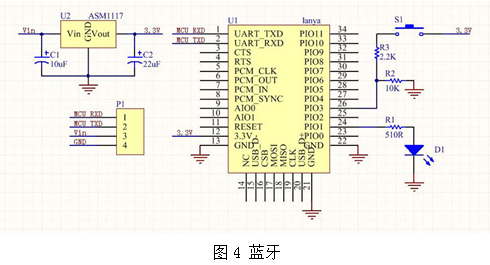
四、辅助部分:
本部分辅助各功能部分完成相应的功能。
(1)稳压芯片
选用7805芯片,将电池输出的电压稳压为直流稳压5V供各部分使用。
(2)节能装置
选用两个8050三极管,当追踪部分或循迹部分不工作时断开其与电源的连接。
设计说明:
原理图:
当给小车上电时,小车会进入开机硬件自检,自检指示灯闪烁,首先伺服电机承载超声波左右45度角转动,之后小车前后左右个运动一次,最终回到原点。自检完成后,硬件正常则自检指示灯常亮,并进入功能选择环节,功能指示灯闪烁等待用户选择功能。用户的智能设备与小车配对连接后,用户可通过上位机软件选择功能。
小车的大致执行流程图如图6。
当用户选择遥控功能时,遥控功能指示灯亮。用户可通过上位机软件的方向键来遥控小车运动。
当用户选择物体追踪功能时,追踪指示灯亮。小车首先判断与目标物体间的距离。当小车与物体间的距离小于20cm时,小车会通过后退保持与目标物体间的距离为20cm。当小车与物体间的距离等于20cm时,小车会停止。当小车与物体间的距离大于20cm时,小车会通过前进保持与目标物体间的距离为20cm。当小车正前方无目标时,伺服电机会承载超声波左右探测,在左右一方探测到目标时,小车会向相应的方向转动实现追踪。若目标消失,小车原地停止并左右探测。
当用户选择自动循迹功能时,循迹指示灯亮。小车会沿着循迹跑道运动。若小车受到外界干扰而小范围的偏离跑道小车能自动循回跑道。
当小车在任何功能下运行时,用户可按下动态停机键使小车停止运动,停机指示灯亮,等待用户再次选择功能。
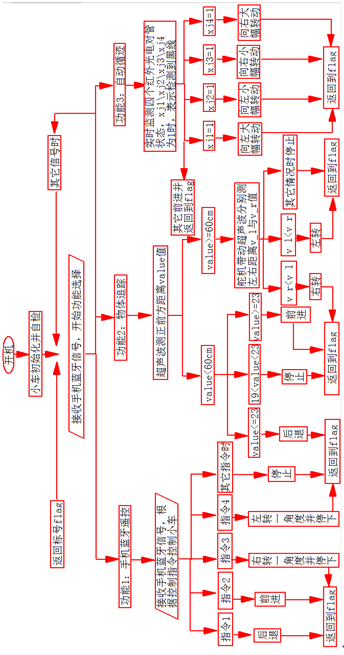
图6 小车执行流程图
此文档的相关视频来自:http://v.eepw.com.cn/video/play/id/13447
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

