
滤波还是一个很实用又很复杂的东西。
楼主 谢谢分享了
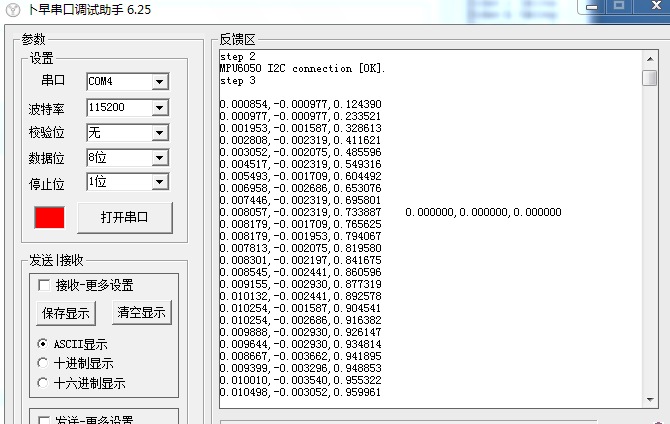
前面介绍了crazyflie的数据融合的处理方法,这里对mpu6050的数据按照这种方法处理,得到以下的运行结果。
刚启动时的结果:
稳态建立后的结果为:
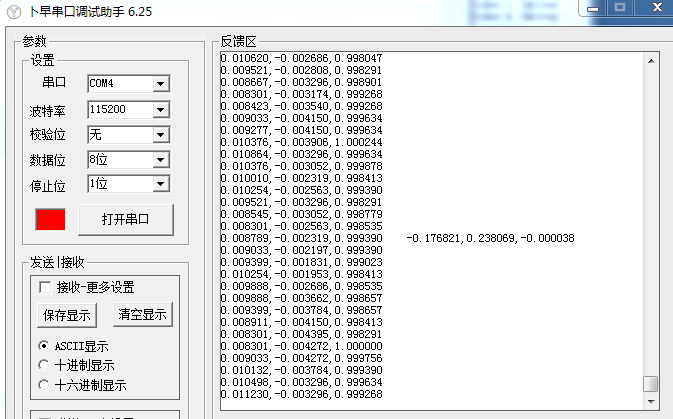
上面的数据为加速度的数据,单位为G。可以看到处理后的数据精度比较高,在千分之2左右,效果还是比较好的。
Mahony的算法的解读
------本文参考于http://www.eepw.com.cn/article/247809.htm
本帖目的是通过分析函数,学习四元数的算法,就是新闻里说的“消化吸收再创新”,主要是前两个,至于再创新那就不一定有这个本事了。
本文将分析一种常见的四轴飞行器姿态解算方法,Mahony的互补滤波法。此法简单有效,希望能给学习四轴飞行器的朋友们带来帮助。关于姿态解算和滤波的理论知识,推荐秦永元的两本书,一是《惯性导航》,目前已出到第二版了;二是《卡尔曼滤波与组合导航原理》。程序中的理论基础,可在书中寻找。
经常在算法中碰到IMU和AHRS这两个词,关于这两个词的具体含义与区别,这个地址有讨论:http://www.douban.com/note/75915865/,不懂得人可以稍微了解一下。不说别的,直奔主题。
下面开始进入正题:
先定义Kp,Ki,以及halfT 。
Kp,Ki,控制加速度计修正陀螺仪积分姿态的速度,halfT ,姿态解算时间的一半。此处解算姿态速度为500HZ,因此halfT 为0.001
#define Kp 2.0f
#define Ki 0.002f
#define halfT 0.001f
初始化四元数
float q0 = 1, q1 = 0, q2 = 0, q3 = 0;
定义姿态解算误差的积分
float exInt = 0, eyInt = 0, ezInt = 0;
以下为姿态解算函数。
参数gx,gy,gz分别对应三个轴的角速度,单位是弧度/秒;
参数ax,ay,az分别对应三个轴的加速度原始数据
由于加速度的噪声较大,此处应采用滤波后的数据
void IMUupdate(float gx, float gy, float gz, float ax, float ay, float az)
{
float norm;
float vx, vy, vz;
float ex, ey, ez;
将加速度的原始数据,归一化,得到单位加速度
norm = sqrt(ax*ax + ay*ay + az*az);
ax = ax / norm;
ay = ay / norm;
az = az / norm;
把四元数换算成“方向余弦矩阵”中的第三列的三个元素。根据余弦矩阵和欧拉角的定义,地理坐标系的重力向量,转到机体坐标系,正好是这三个元素。所以这里的vx、vy、vz,其实就是当前的机体坐标参照系上,换算出来的重力单位向量。(用表示机体姿态的四元数进行换算)
vx = 2*(q1*q3 - q0*q2);
vy = 2*(q0*q1 + q2*q3);
vz = q0*q0 - q1*q1 - q2*q2 + q3*q3;
这里说明一点,加速度计由于噪声比较大,而且在飞行过程中,受机体振动影响比陀螺仪明显,短时间内的可靠性不高。陀螺仪噪声小,但是由于积分是离散的,长时间的积分会出现漂移的情况,因此需要将用加速度计求得的姿态来矫正陀螺仪积分姿态的漂移。
在机体坐标参照系上,加速度计测出来的重力向量是ax、ay、az;陀螺积分后的姿态来推算出的重力向量是vx、vy、vz;它们之间的误差向量,就是陀螺积分后的姿态和加速度计测出来的姿态之间的误差。
向量间的误差,可以用向量积(也叫外积、叉乘)来表示,ex、ey、ez就是两个重力向量的叉积。这个叉积向量仍旧是位于机体坐标系上的,而陀螺积分误差也是在机体坐标系,而且叉积的大小与陀螺积分误差成正比,正好拿来纠正陀螺。由于陀螺是对机体直接积分,所以对陀螺的纠正量会直接体现在对机体坐标系的纠正。
叉乘是数学基础,维基百科里有详细解释。
ex = (ay*vz - az*vy);
ey = (az*vx - ax*vz);
ez = (ax*vy - ay*vx);
将叉乘误差进行积分
exInt = exInt + ex*Ki;
eyInt = eyInt + ey*Ki;
ezInt = ezInt + ez*Ki;
用叉乘误差来做PI修正陀螺零偏,通过调节Kp,Ki两个参数,可以控制加速度计修正陀螺仪积分姿态的速度
gx = gx + Kp*ex + exInt;
gy = gy + Kp*ey + eyInt;
gz = gz + Kp*ez + ezInt;
四元数微分方程,没啥好说的了,看上面推荐的书吧,都是理论的东西,自个琢磨琢磨
实在琢磨不明白,那就把指定的参数传进这个函数,再得到相应的四元数,最后转化成欧拉角即可了。不过建议还是把理论弄清楚一点。
q0 = q0 + (-q1*gx - q2*gy - q3*gz)*halfT;
q1 = q1 + (q0*gx + q2*gz - q3*gy)*halfT;
q2 = q2 + (q0*gy - q1*gz + q3*gx)*halfT;
q3 = q3 + (q0*gz + q1*gy - q2*gx)*halfT;
四元数单位化
norm = sqrt(q0*q0 + q1*q1 + q2*q2 + q3*q3);
q0 = q0 / norm;
q1 = q1 / norm;
q2 = q2 / norm;
q3 = q3 / norm;
}
姿态解算后,就得到了表示姿态的四元数。
看完SPI的视频,一头雾水,还是看看怎么用NFR吧,上网址:
阅读匿名的NRF驱动程序和数据发送程序,总结一下:
一、端口配置(Spi.h)
void Spi1_Init(void);
//配置SPI的用到的GPIO端口和SPI参数
u8 Spi_RW(u8 dat);
二、驱动程序部分(Nrf2401.h):
void Nrf24l01_Init(u8 model, u8 ch);
//初始化,model=1/2/3/4,ch为实用的通道号uint8_t NRF_Read_Reg(uint8_t reg);
//读寄存器
uint8_t NRF_Write_Reg(uint8_t reg, uint8_t value);
//写寄存器
uint8_t NRF_Read_Buf(uint8_t reg, uint8_t *pBuf, uint8_t uchars);
//读缓冲区
void NRF_TxPacket(uint8_t * tx_buf, uint8_t len);
//发送数据包,用于model 2/4
void NRF_TxPacket_AP(uint8_t * tx_buf, uint8_t len);
//发送数据包,用于model 3
uint8_t Nrf24l01_Check(void);
//自检
三、数据的发送接收程序(Rc.h):
void Nrf_Check_Event(void);
//判断解锁
void NRF_Send_AF(void);
//发送加速度,角速度,四元数得到的角度等
void NRF_Send_AE(void);
//接收到的RC数据
void NRF_Send_OFFSET(void);
//发送加速度偏移,角速度偏移
void NRF_Send_PID(void);
//发送RPY三个值的PID值
void NRF_Send_ARMED(void);
//发送解锁信息
分析Crazyflie的Nrf24L01的驱动程序:
该代码使用了外部中断,关于外部中断的教程,可见
http://www.cnblogs.com/alvis-jing/p/3678285.html
该博主的其他关于STM32 的文章,见
http://www.cnblogs.com/alvis-jing/category/569663.html,先mark一下。
一、驱动程序(Nrf24l01.h)
/***********************
* SPI private methods,与匿名的Spi_RW()相同 *
***********************/
static char spiSendByte(char byte)
{
/* Loop while DR register in not emplty */
while (SPI_I2S_GetFlagStatus(RADIO_SPI, SPI_I2S_FLAG_TXE) == RESET);
/* Send byte through the SPI1 peripheral */
SPI_I2S_SendData(RADIO_SPI, byte);
/* Wait to receive a byte */
while (SPI_I2S_GetFlagStatus(RADIO_SPI, SPI_I2S_FLAG_RXNE) == RESET);
/* Return the byte read from the SPI bus */
return SPI_I2S_ReceiveData(RADIO_SPI);
}
static char spiReceiveByte()
{
return spiSendByte(DUMMY_BYTE);
}
//该函数增加了SPI的中断引脚的定义
void nrfInit(void);
/* Initialisation */
void nrfInit(void)
{
SPI_InitTypeDef SPI_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
if (isInit)
return;
/* Enable the EXTI interrupt router */
extiInit();
/* Enable SPI and GPIO clocks */
RCC_APB2PeriphClockCmd(RADIO_GPIO_SPI_CLK | RADIO_GPIO_CS_PERIF |
RADIO_GPIO_CE_PERIF | RADIO_GPIO_IRQ_PERIF, ENABLE);
/* Enable SPI and GPIO clocks */
RCC_APB1PeriphClockCmd(RADIO_SPI_CLK, ENABLE);
/* Configure main clock */
GPIO_InitStructure.GPIO_Pin = RADIO_GPIO_CLK;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(RADIO_GPIO_CLK_PORT, &GPIO_InitStructure);
/* Configure SPI pins: SCK, MISO and MOSI */
GPIO_InitStructure.GPIO_Pin = RADIO_GPIO_SPI_SCK | RADIO_GPIO_SPI_MOSI;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(RADIO_GPIO_SPI_PORT, &GPIO_InitStructure);
//* Configure MISO */
GPIO_InitStructure.GPIO_Pin = RADIO_GPIO_SPI_MISO;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(RADIO_GPIO_SPI_PORT, &GPIO_InitStructure);
/* Configure I/O for the Chip select */
GPIO_InitStructure.GPIO_Pin = RADIO_GPIO_CS;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(RADIO_GPIO_CS_PORT, &GPIO_InitStructure);
/* Configure the interruption (EXTI Source) */
GPIO_InitStructure.GPIO_Pin = RADIO_GPIO_IRQ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(RADIO_GPIO_IRQ_PORT, &GPIO_InitStructure);
GPIO_EXTILineConfig(RADIO_GPIO_IRQ_SRC_PORT, RADIO_GPIO_IRQ_SRC);
EXTI_InitStructure.EXTI_Line = RADIO_GPIO_IRQ_LINE;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
// Clock the radio with 16MHz
RCC_MCOConfig(RCC_MCO_HSE);
/* disable the chip select */
RADIO_DIS_CS();
/* Configure I/O for the Chip Enable */
GPIO_InitStructure.GPIO_Pin = RADIO_GPIO_CE;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(RADIO_GPIO_CE_PORT, &GPIO_InitStructure);
/* disable the chip enable */
RADIO_DIS_CE();
/* SPI configuration */
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_8;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(RADIO_SPI, &SPI_InitStructure);
/* Enable the SPI */
SPI_Cmd(RADIO_SPI, ENABLE);
isInit = true;
}
//测试设备是否已经初始化
bool nrfTest(void);
// Interrupt routine
void nrfIsr(void);
/*** Defines ***/
#define RADIO_RATE_250K 0
#define RADIO_RATE_1M 1
#define RADIO_RATE_2M 2
/* Low level reg access
* FIXME: the user should not need to access raw registers...
*/
/* Read len bytes from a nRF24L register. 5 Bytes max */
unsigned char nrfReadReg(unsigned char address, char *buffer, int len);
/* Write len bytes a nRF24L register. 5 Bytes max */
unsigned char nrfWriteReg(unsigned char address, char *buffer, int len);
/* Read only one byte (useful for most of the reg.) */
unsigned char nrfRead1Reg(unsigned char address);
/* Write only one byte (useful for most of the reg.) */
unsigned char nrfWrite1Reg(unsigned char address, char byte);
//Interrupt access设置中断回调函数
//回调函数有两个,分别位于Radiolink.c和Eskylink.c
void nrfSetInterruptCallback(void (*cb)(void));
/* Low level functionality of the nrf chip */
/* Sent the NOP command. Used to get the status byte */
unsigned char nrfNop(void);
unsigned char nrfFlushRx(void);
unsigned char nrfFlushTx(void);
// Return the payload length
unsigned char nrfRxLength(unsigned int pipe);
unsigned char nrfActivate(void);
// Write the ack payload of the pipe 0
unsigned char nrfWriteAck(unsigned int pipe, char *buffer, int len);
// Read the RX payload
unsigned char nrfReadRX(char *buffer, int len);
void nrfSetChannel(unsigned int channel);
void nrfSetDatarate(int datarate);
void nrfSetAddress(unsigned int pipe, char* address);
void nrfSetEnable(bool enable);
unsigned char nrfGetStatus(void);
/* 中断服务程序,调用中断回调函数 */
void nrfIsr()
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

