
六点定位原理
一个自由的物体,它对三个相互垂直的坐标系来说,有六个活动可能性,其中三种是移动,三种是转动。习惯上把这种活动的可能性称为自由度,因此空间任一自由物体共有六个自由度。
如下图所示:
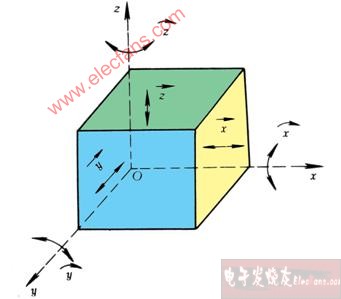
工件在空中的自由度
未受约束的刚体,在空间的位置是不确定的,它具有六个自由度: 。为使刚体在空间具有确定的
。为使刚体在空间具有确定的
位置,就必须限制其六个自由度。
定位就是用各种形状不同的定位元件,来限制工件的自由度。
六点定位原理:用六个支承点分别限制工件的六个自由度从而使工件在夹具中得到正确加工位置的方法称为六点定位原理.
强调:是用六个支承点,而不是用六个定位元件
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

