
终于特么的考完试了。。。。终于大三也结束了。。。终于特么地变成大四狗了......
看来好多直播的帖子。。。各种详细的焊接步骤、程序代码都有
所以我很惆怅我该写些什么,想了想,一方面因为我焊了三年东西了。。。这种直插焊接过于简单。。略了。。
另一方面因为STM32实在过于熟悉。。。所以那些个什么工程建立。。PWM驱动程序。。也略了。。
所以我想写一点数学,但是数学估计没人想看,而且我这个人又懒,什么东西就算学会了,也真的懒得总结出来,算了,能坚持到什么时候就什么时候吧
四轴的一个难点在于姿态检测,说到这就不得不提到卡尔曼滤波。
早在1795年,C.F.Gauss为测定行星运行轨道,提出了最小二乘法,最小二乘法的最优指标是估计量测的均方误差最小,没有考虑到被估参数的统计特性;R.A.Fisher于1912年提出最大似然估计法,他从概率密度的角度考虑估计问题,但这种方法没有考虑到先验信息;上世纪40年代,N.Wiener为解决火力控制系统的精确跟踪问题,提出了一种频域设计方法——维纳滤波,该方法的适用范围有限,要求信号一维平稳;1960年,R.E.Kailman提出卡尔曼滤波器,它是一种时域滤波方法,采用状态空间描述系统,算法采用递推机制,数据存储量小,可以处理多维和非平稳过程。
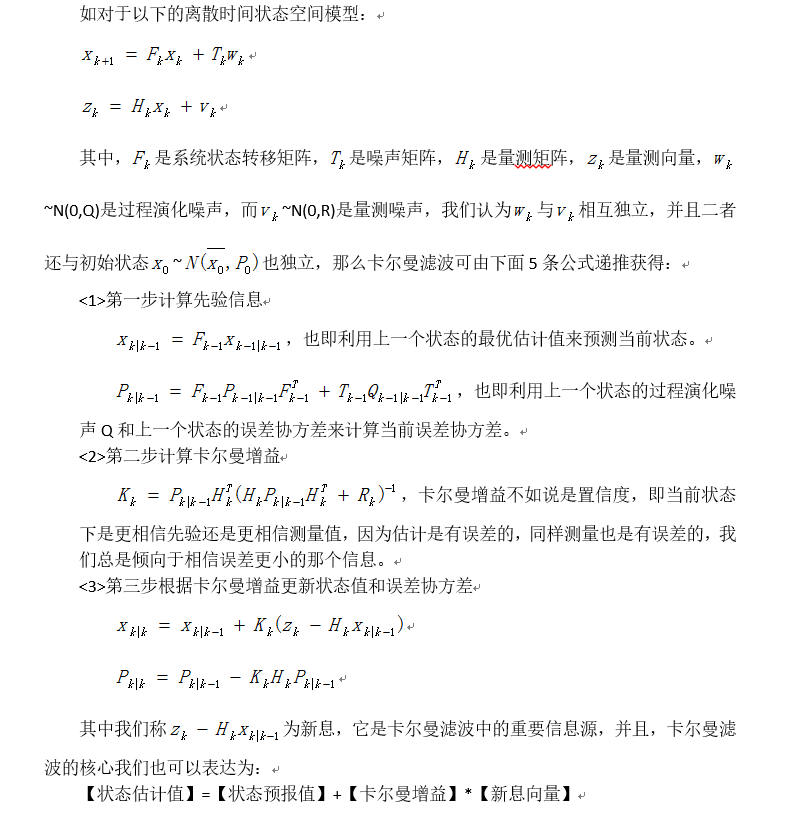
总之,卡尔曼滤波是在离散空间下的最小均方误差准则滤波器,其滤波需要建立较准确的系统和观测模型(最初的卡尔曼滤波不仅要求系统是线性的,并且要求量测方程也是线性的,后人研究了其在非线性条件下的推广,提出了EKF、UKF和CMKF),在每个递推周期中,卡尔曼滤波器需要完成对被估计量的时间更新和量测更新两个过程,时间更新方程旨在实现对系统状态的先验估计,测量方程用于组合先验估计和量测值以获得后验估计,这点有点像贝叶斯估计,即系统决策依赖于后验,而后验又取决于先验和样本。
下面我们用板子采集MPU6050的六轴数据,看看效果,顺便发个冷知识,估计知道的人不多,就是怎么通过仿真器把数据从ARM抓到PC上,这样就免去串口这种又慢又麻烦的方法了。
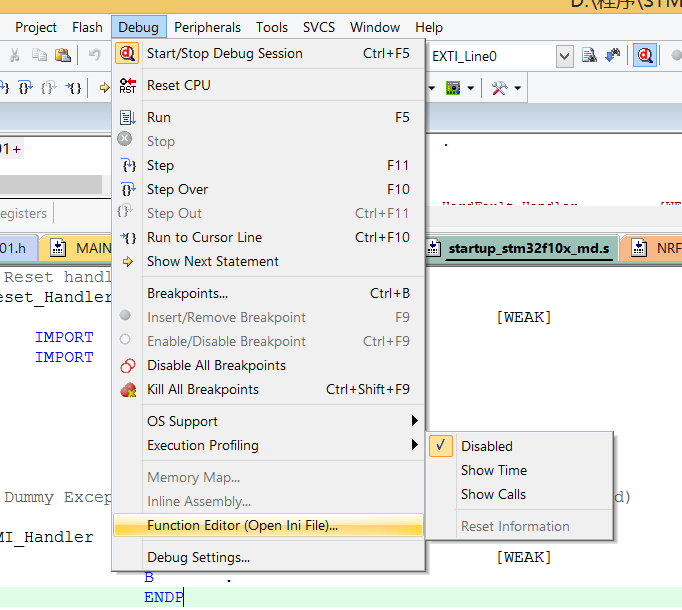
在DEBUG下,当数据已经采集到ARM的内存中后,暂停CPU运行,点击DEBUG->FUNCTION EDITOR
出现INI的编译窗口,
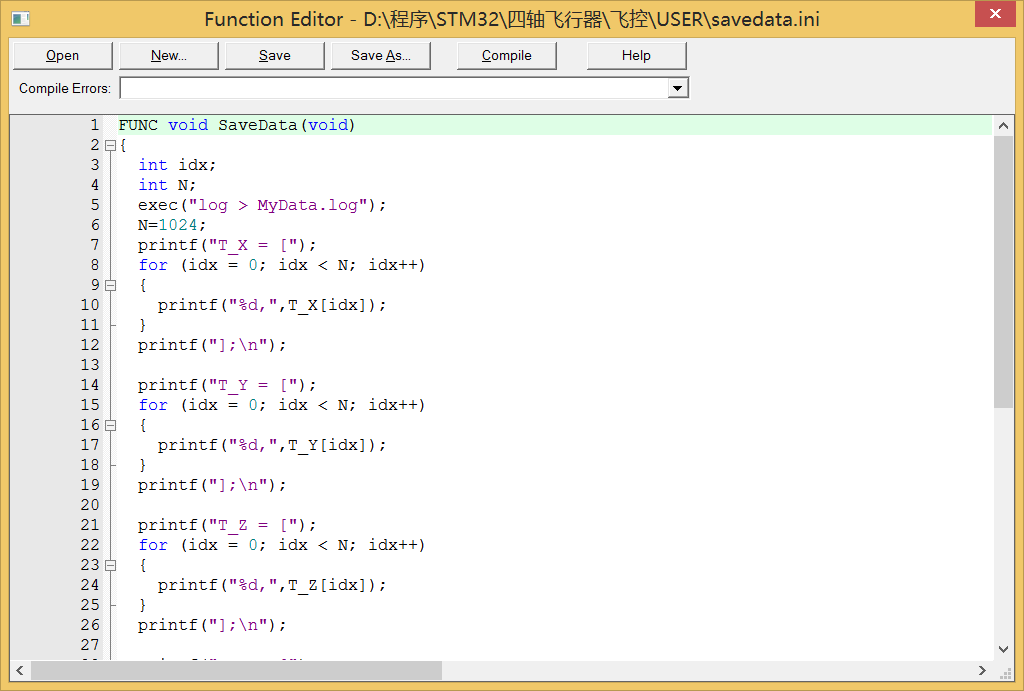
我们处理数据由于是在MATLAB下进行的,所以直接printf按照MATLAB格式输出到txt文件 复制到MATLAB直接用
FUNC void SaveData(void)
{
int idx;
int N;
exec("log > MyData.log");
N=1024;
printf("T_X = [");
for (idx = 0; idx < N; idx++)
{
printf("%d,",T_X[idx]);
}
printf("];\n");
printf("T_Y = [");
for (idx = 0; idx < N; idx++)
{
printf("%d,",T_Y[idx]);
}
printf("];\n");
printf("T_Z = [");
for (idx = 0; idx < N; idx++)
{
printf("%d,",T_Z[idx]);
}
printf("];\n");
printf("G_X = [");
for (idx = 0; idx < N; idx++)
{
printf("%d,",G_X[idx]);
}
printf("];\n");
printf("G_Y = [");
for (idx = 0; idx < N; idx++)
{
printf("%d,",G_Y[idx]);
}
printf("];\n");
printf("G_Z = [");
for (idx = 0; idx < N; idx++)
{
printf("%d,",G_Z[idx]);
}
printf("];\n");
exec("log off");
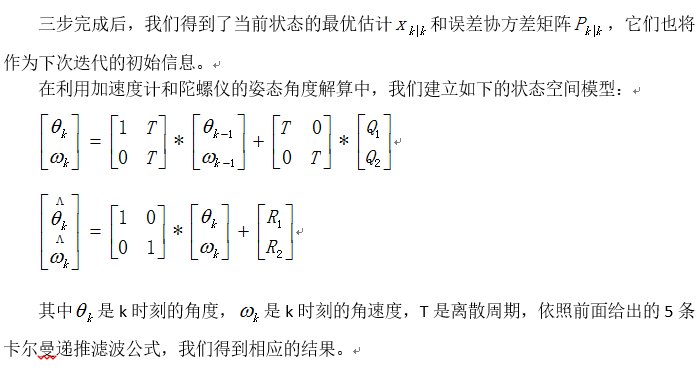
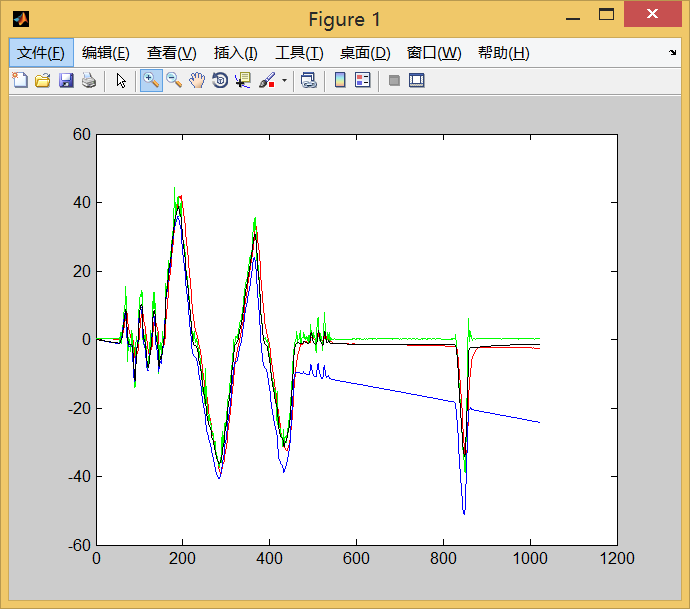
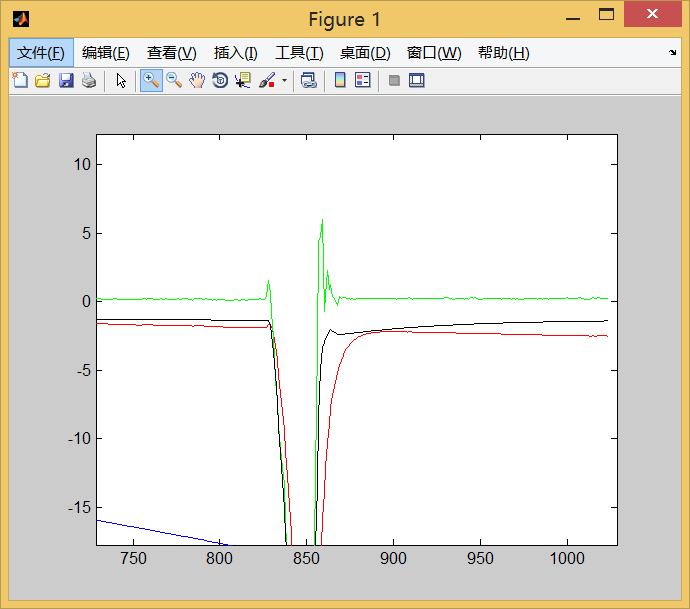
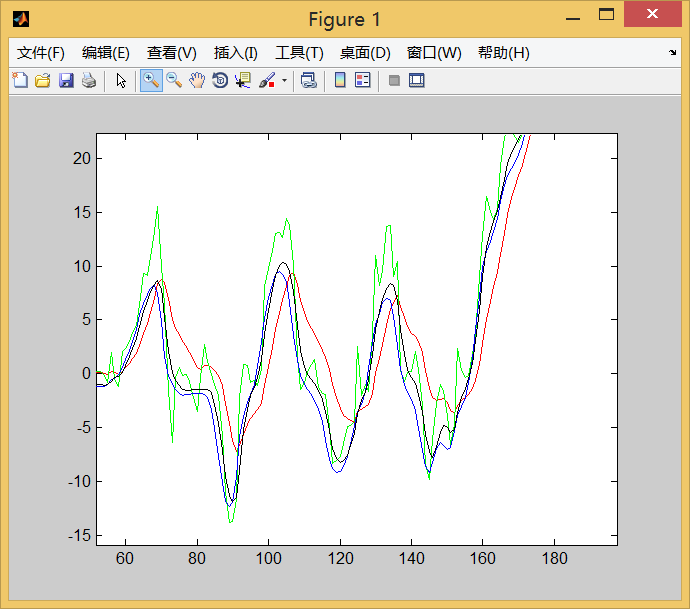
} 按照已经建立好的状态空间模型,我们在MATLAB中处理这段6轴数据,得到融合角度。
P=[0 0;0 0];
H=[1 dt;0 1];
T=[dt 0;0 dt];
Q=[0.01 0;0 0.001];
R=[0.03 0;0 0.03];
Klm_Angle_X(i) = Klm_Angle_X(i-1) + bias(i-1) * dt; %先验计算
bias(i) = GYR_X(i);
P=H*P*H'+T*Q*T';
K=P/(P+R); %卡尔曼增益计算
Klm_Angle_X(i)=Klm_Angle_X(i)+K(1,1)*(Angle_X_Acc(i)-Klm_Angle_X(i))+K(1,2)*(GYR_X(i)-bias(i)); %状态预测
bias(i)=bias(i)+K(2,1)*(Angle_X_Acc(i)-Klm_Angle_X(i))+K(2,2)*(GYR_X(i)-bias(i));
P=P-K*P;
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

