
1、四个概念:“地理”坐标系、“机体”坐标系、他们之间换算公式、换算公式用的系数。
地理坐标系:东、北、天,以下简称地理。在这个坐标系里有重力永远是(0,0,1g),地磁永远是(0,1,x)(地磁的垂直不关心)两个三维向量。
机体坐标系:以下简称机体,上面有陀螺、加计、电子罗盘传感器,三个三维向量。
换算公式:以下简称公式,公式就是描述机体姿态的表达方法,一般都是用以地理为基准,从地理换算到机体的公式,有四元数、欧拉角、方向余弦矩阵。
换算公式的系数:以下简称系数,四元数的q0123、欧拉角的ROLL/PITCH/YAW、余弦矩阵的9个数。系数就是描述机体姿态的表达方法的具体数值。
姿态,其实就是公式+系数的组合,一般经常用人容易理解的公式“欧拉角”表示,系数就是横滚xx度俯仰xx度航向xx度。
2、五个数据源:重力、地磁、陀螺、加计、电子罗盘,前两个来自地理,后三个来自机体。
3、陀螺向量:基于机体,也在机体上积分,因为地理上无参考数据源,所以很独立,直接在公式的老系数上积分,得到新系数。
狭义上的捷联惯导算法,就是指这个陀螺积分公式,也分为欧拉角、方向余弦矩阵、四元数,他们的积分算法有增量法、数值积分法(X阶龙格-库塔)等等
4、加计向量、重力向量:加计基于机体,重力基于地理,重力向量(0,0,1g)用公式换算到机体,与机体的加计向量算出误差。理论上应该没有误差,这误差逆向思维一下,其实就是换算公式的系数误差。所以这误差可用于纠正公式的系数(横滚、俯仰),也就是姿态。
5、电子罗盘向量、地磁向量:同上,只不过要砍掉地理上的垂直向量,因为无用。只留下地理水平面上的向量。误差可以用来纠正公式的系数(航向)。
6、就这样,系数不停地被陀螺积分更新,也不停地被误差修正,它和公式所代表的姿态也在不断更新。
如果积分和修正用四元数算法(因为运算量较少、无奇点误差),最后用欧拉角输出控制PID(因为角度比较直观),那就需要有个四元数系数到欧拉角系数的转换。常用的三种公式,它们之间都有转换算法。
再搞个直白一点的例子:
机体好似一条船,地理就是那地图,姿态就是航向(船头在地图上的方位),重力和地磁是地图上的灯塔,陀螺/积分公式是舵手,加计和电子罗盘是瞭望手。
舵手负责估计和把稳航向,他相信自己,本来船向北开的,就一定会一直往北开,觉得转了90度弯,那就会往东开。
当然如果舵手很牛逼,也许能估计很准确,维持很长时间。不过只信任舵手,肯定会迷路,所以一般都有地图和瞭望手来观察误差。
瞭望手根据地图灯塔方位和船的当前航向,算出灯塔理论上应该在船的X方位。然而看到实际灯塔在船的Y方位,那肯定船的当前航向有偏差了,偏差就是ERR=X-Y。
舵手收到瞭望手给的ERR报告,觉得可靠,那就听个90%*ERR,觉得天气不好、地图误差大,那就听个10%*ERR,根据这个来纠正估算航向。。
------------------------------------------------------
来点干货,注意以下的欧拉角都是这样的顺序:先航向-再俯仰-然后横滚
公式截图来自:袁信、郑锷的《捷联式惯性导航原理》,邓正隆的《惯性技术》。
--------------------------------------------------
根据加计计算初始欧拉角
这个无论欧拉角算法还是四元数算法还是方向余弦矩阵都需要,因为加计和电子罗盘给出欧拉角的描述方式比较方便。
imu.euler.x = atan2(imu.accel.y, imu.accel.z);
imu.euler.y = -asin(imu.accel.x / ACCEL_1G);
ACCEL_1G 为9.81米/秒^2,accel.xyz的都为这个单位,算出来的euler.xyz单位是弧度
航向imu.euler.z可以用电子罗盘计算
--------------------------------------------------
欧拉角微分方程
如果用欧拉角算法,那么这个公式就够了,不需要来回转换。
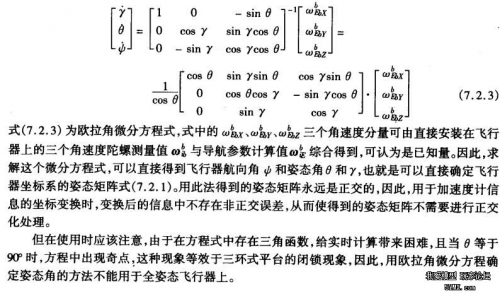
矩阵上到下三个角度(希腊字母)是roll pitch和yaw,公式最左边的上面带点的三个是本次更新后的角度,不带点的是上个更新周期算出来的角度。
Wx,y,z是roll pitch和yaw方向的三个陀螺在这个周期转动过的角度,单位为弧度,计算为间隔时间T*陀螺角速度,比如0.02秒*0.01弧度/秒=0.0002弧度.
--------------------------------------------------
以下是四元数
--------------------------------------------------
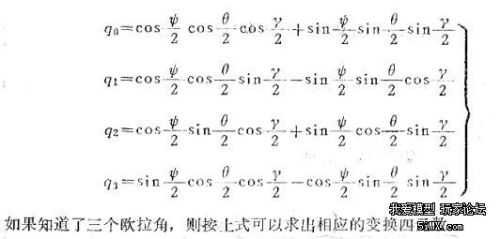
四元数初始化
q0-3为四元数四个值,用最上面公式根据加计计算出来的欧拉角来初始化
--------------------------------------------------
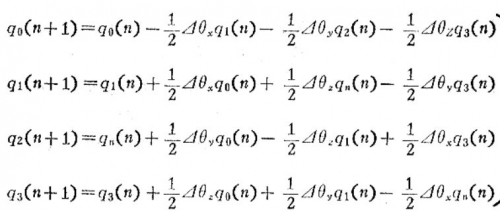
四元数微分方程
四元数更新算法,一阶龙库法,同样4个量(入、P1-3)也为四元数的四个值,即上面的q0-3。
Wx,y,z是三个陀螺的这个周期的角速度,比如欧拉角微分方程中的0.01弧度/秒,T为更新周期,比如上面的0.02秒。

再来一张,另外一本书上的,仔细看和上面是一样的delta角度,就是上面的角速度*周期,单位为弧度
--------------------------------------------------
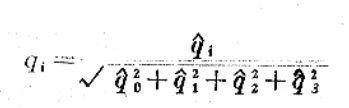
四元数微分方程更新后的规范化
每个周期更新完四元数,需要对四元数做规范化处理。因为四元数本来就定义为四维单位向量。
求q0-3的平方和,再开根号算出的向量长度length。然后每个q0-3除这个length。
--------------------------------------------------
四元数转欧拉角公式
把四元数转成了方向余弦矩阵中的几个元素,再用这几个元素转成了欧拉角
先从四元数q0-3转成方向余弦矩阵:

再从方向余弦矩阵转成欧拉角
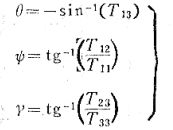
代码:
//更新方向余弦矩阵
t11=q.q0*q.q0+q.q1*q.q1-q.q2*q.q2-q.q3*q.q3;
t12=2.0*(q.q1*q.q2+q.q0*q.q3);
t13=2.0*(q.q1*q.q3-q.q0*q.q2);
t21=2.0*(q.q1*q.q2-q.q0*q.q3);
t22=q.q0*q.q0-q.q1*q.q1+q.q2*q.q2-q.q3*q.q3;
t23=2.0*(q.q2*q.q3+q.q0*q.q1);
t31=2.0*(q.q1*q.q3+q.q0*q.q2);
t32=2.0*(q.q2*q.q3-q.q0*q.q1);
t33=q.q0*q.q0-q.q1*q.q1-q.q2*q.q2+q.q3*q.q3;
//求出欧拉角
imu.euler.roll = atan2(t23,t33);
imu.euler.pitch = -asin(t13);
imu.euler.yaw = atan2(t12,t11);
if (imu.euler.yaw < 0){
imu.euler.yaw +=
ToRad(360);
}
----------------------------------------------------
以下代码摘自网上,很巧妙,附上注释,有四元数微分,有加计耦合。
没电子罗盘,其实耦合原理也一样。
//=====================================================================================================
// IMU.c
// S.O.H. Madgwick
// 25th September 2010
//=====================================================================================================
// Description:
//
// Quaternion implementation of the 'DCM filter' [Mayhony et al].
//
// User must define 'halfT' as the (sample period / 2), and the filter gains 'Kp' and 'Ki'.
//
// Global variables 'q0', 'q1', 'q2', 'q3' are the quaternion elements representing the estimated
// orientation. See my report for an overview of the use of quaternions in this application.
//
// User must call 'IMUupdate()' every sample period and parse calibrated gyroscope ('gx', 'gy', 'gz')
// and accelerometer ('ax', 'ay', 'ay') data. Gyroscope units are radians/second, accelerometer
// units are irrelevant as the vector is normalised.
//
//=====================================================================================================
//----------------------------------------------------------------------------------------------------
// Header files
#include "IMU.h"
#include <math.h>
//----------------------------------------------------------------------------------------------------
// Definitions
#define Kp 2.0f // proportional gain governs rate of convergence to accelerometer/magnetometer
#define Ki 0.005f // integral gain governs rate of convergence of gyroscope biases
#define halfT 0.5f // half the sample period
//---------------------------------------------------------------------------------------------------
// Variable definitions
float q0 = 1, q1 = 0, q2 = 0, q3 = 0; // quaternion elements representing the estimated orientation
float exInt = 0, eyInt = 0, ezInt = 0; // scaled integral error
//====================================================================================================
// Function
//====================================================================================================
void IMUupdate(float gx, float gy, float gz, float ax, float ay, float az) {
float norm;
float vx, vy, vz;
float ex, ey, ez;
// normalise the measurements
norm = sqrt(ax*ax + ay*ay + az*az);
ax = ax / norm;
ay = ay / norm;
az = az / norm;
把加计的三维向量转成单位向量。
// estimated direction of gravity
vx = 2*(q1*q3 - q0*q2);
vy = 2*(q0*q1 + q2*q3);
vz = q0*q0 - q1*q1 - q2*q2 + q3*q3;
这是把四元数换算成《方向余弦矩阵》中的第三列的三个元素。
根据余弦矩阵和欧拉角的定义,地理坐标系的重力向量,转到机体坐标系,正好是这三个元素。
所以这里的vx\y\z,其实就是当前的欧拉角(即四元数)的机体坐标参照系上,换算出来的重力单位向量。
// error is sum of cross product between reference direction of field and direction measured by sensor
ex = (ay*vz - az*vy);
ey = (az*vx - ax*vz);
ez = (ax*vy - ay*vx);
axyz是机体坐标参照系上,加速度计测出来的重力向量,也就是实际测出来的重力向量。
axyz是测量得到的重力向量,vxyz是陀螺积分后的姿态来推算出的重力向量,它们都是机体坐标参照系上的重力向量。
那它们之间的误差向量,就是陀螺积分后的姿态和加计测出来的姿态之间的误差。
向量间的误差,可以用向量叉积(也叫向量外积、叉乘)来表示,exyz就是两个重力向量的叉积。
这个叉积向量仍旧是位于机体坐标系上的,而陀螺积分误差也是在机体坐标系,而且叉积的大小与陀螺积分误差成正比,正好拿来纠正陀螺。(你可以自己拿东西想象一下)由于陀螺是对机体直接积分,所以对陀螺的纠正量会直接体现在对机体坐标系的纠正。
// integral error scaled integral gain
exInt = exInt + ex*Ki;
eyInt = eyInt + ey*Ki;
ezInt = ezInt + ez*Ki;
// adjusted gyroscope measurements
gx = gx + Kp*ex + exInt;
gy = gy + Kp*ey + eyInt;
gz = gz + Kp*ez + ezInt;
用叉积误差来做PI修正陀螺零偏
// integrate quaternion rate and normalise
q0 = q0 + (-q1*gx - q2*gy - q3*gz)*halfT;
q1 = q1 + (q0*gx + q2*gz - q3*gy)*halfT;
q2 = q2 + (q0*gy - q1*gz + q3*gx)*halfT;
q3 = q3 + (q0*gz + q1*gy - q2*gx)*halfT;
四元数微分方程
// normalise quaternion
norm = sqrt(q0*q0 + q1*q1 + q2*q2 + q3*q3);
q0 = q0 / norm;
q1 = q1 / norm;
q2 = q2 / norm;
q3 = q3 / norm;
四元数规范化
}
//====================================================================================================
// END OF CODE
//====================================================================================================
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

