
鉴于反馈通路中相移(或者称作延迟)引起的诸多问题,我们一直在追求运算放大器的稳定性。通过上次的讨论我们知道,电容性负载稳定性是一个棘手的问题。
“麻烦制造者”运算放大器
开环输出电阻 (Ro),实际并非运算放大器内部的一个电阻器。它是一个依赖于运算放大器内部电路的等效电阻。如果不改变运算放大器,也就不可能改变这种电阻。CL 为负载电容。如果您想驱动某个 CL,您就会受困于 Ro 和 CL 形成的极点频率。G=1 时 20MHz 运算放大器的反馈环路内部 1.8MHz 极点频率便会带来问题。请查看图 1。

对于这个问题,有一种常见解决方案—调慢放大器响应速度。想想看,环路具有固定的延迟,其来自 Ro和 CL。为了适应这种延迟,放大器必须更慢地响应,这样它才不至于超过去,错过希望获得的终值。
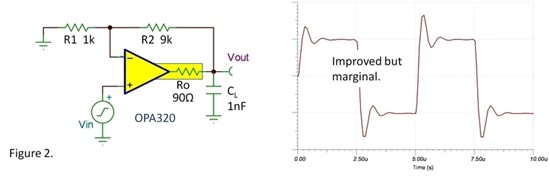
减速的一种好办法是,将运算放大器放置在更高的增益中。高增益降低了闭环放大器的带宽。图 2 显示了驱动相同 1nF 负载但增益为 10 的 OPA320,其小步进值的响应性能得到极大提高,但仍然很小。将增益增加到 25 甚至更大,似乎相当好。
但是另一个问题出现了。图3 增益仍为 10,但增加了 Cc,其将速度又降低了 1 位。Cc 过小时,响应看起来更像图 2。Cc 过大时,可能出现问题,其看起来更像图 1。

恰到好处地补偿,可解决“靠近速率”问题
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

