
1、项目概述 http://forum.eepw.com.cn/thread/273259/1#3
2、项目方案http://forum.eepw.com.cn/thread/273259/1#4
3、硬件设计http://forum.eepw.com.cn/thread/273259/1#5
4、器件采购http://forum.eepw.com.cn/thread/273259/1#6
1、项目概述 http://forum.eepw.com.cn/thread/273259/1#3
2、项目方案http://forum.eepw.com.cn/thread/273259/1#4
3、硬件设计http://forum.eepw.com.cn/thread/273259/1#5
4、器件采购http://forum.eepw.com.cn/thread/273259/1#6
1、平衡车稳定站起来。
2、实现显示屏(NOKIA5110液晶)显示Roll,Groy。
3、平衡车实现左转右转功能,
4、平衡车具有追光功能。
5、平衡车NRF2401无线遥控。
6、平衡车红外线遥控。
7、平衡车手机app遥控。
目前想到这些,日后想到另加。
1、项目概述
DIY平衡车需要稳定的自己独立站立,还具有抗干扰能力,运用的最经典的算法就是PID算法,PID算法中有很多种,选一个合适的就好, 根据MPU6050测得角度以及角加速度,还有根据电机的编码器测得电机速度,积分得位移,进行PID计算来控制电机,从而实现平衡车的站立;电机选用反应速度一定要快,扭矩要大;MCU使用STM32F103C8T6运行速度72MHz,速度够用。
2、项目方案
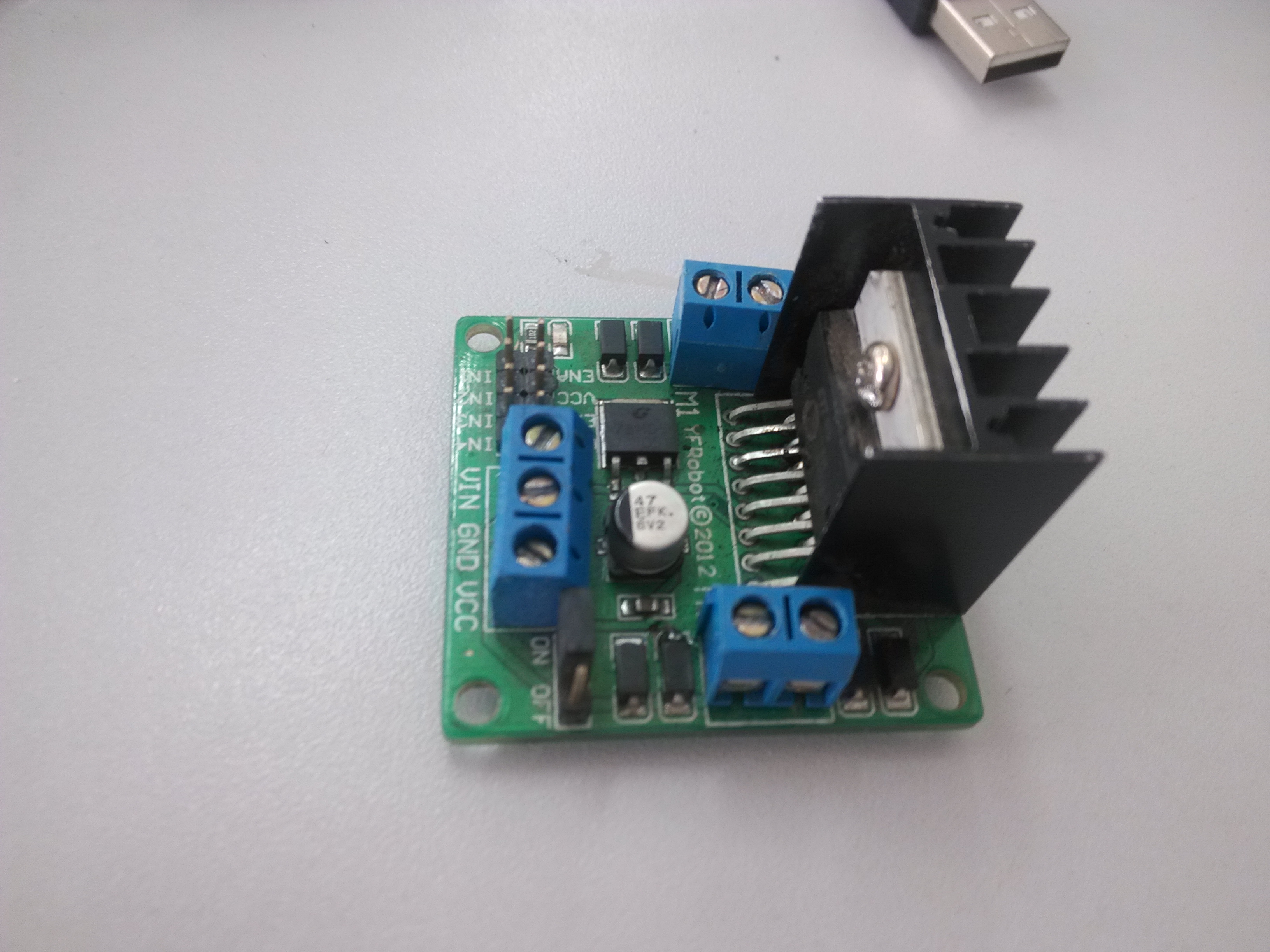
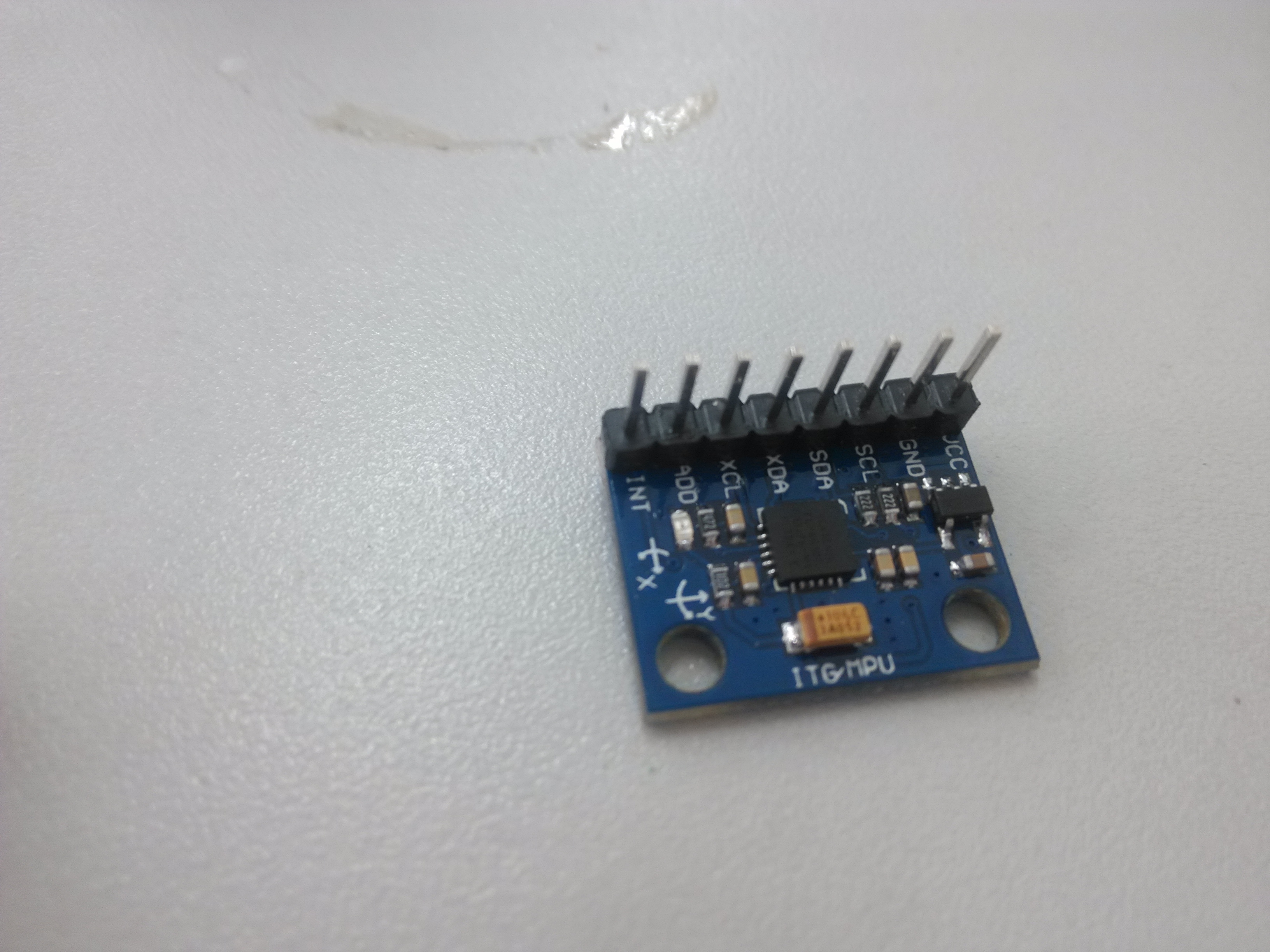
LiDianpengDIY平衡车主控芯片用STM32F103C8T6,角度传感器采用MPU6050,电机驱动采L298N(手里刚好有),电机采用JGA25-371电机内部自带编码器方便,液晶屏采用NOKIA5110点阵屏,电池采用12V锂电池供电,无线采用NRF2401无线模块,同时也用于程序PID参数整定。
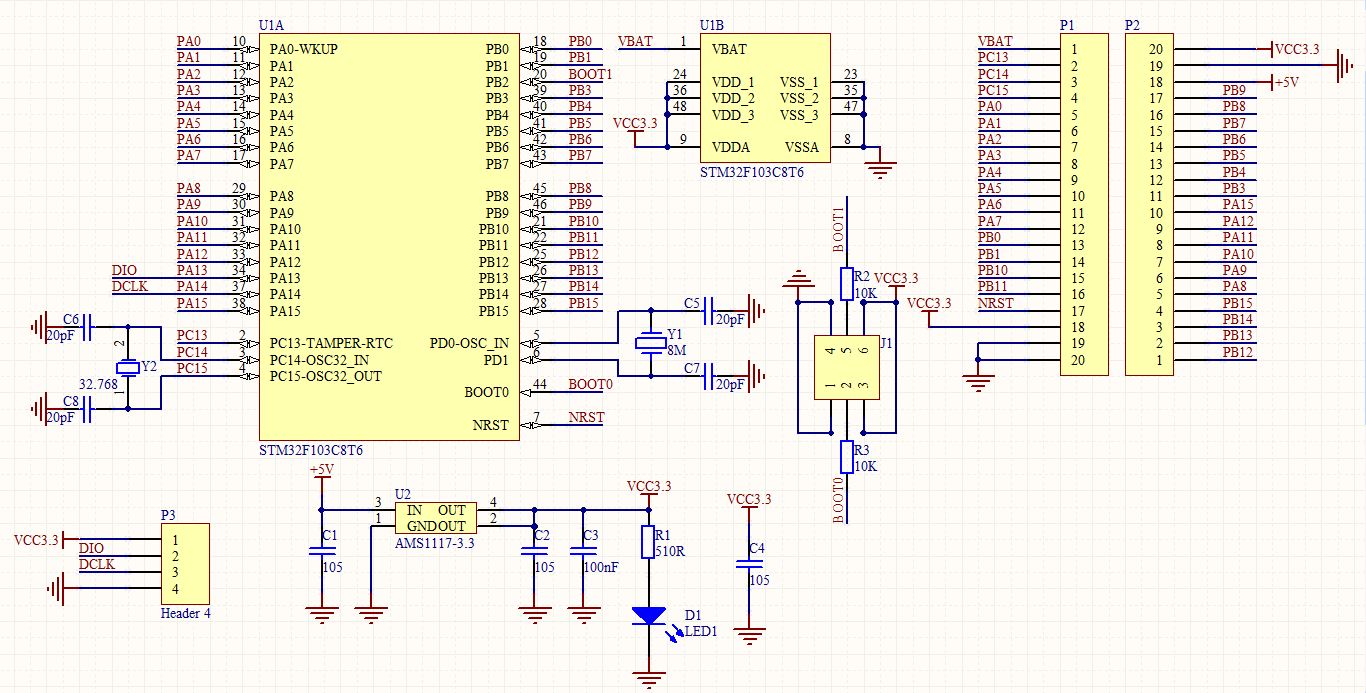
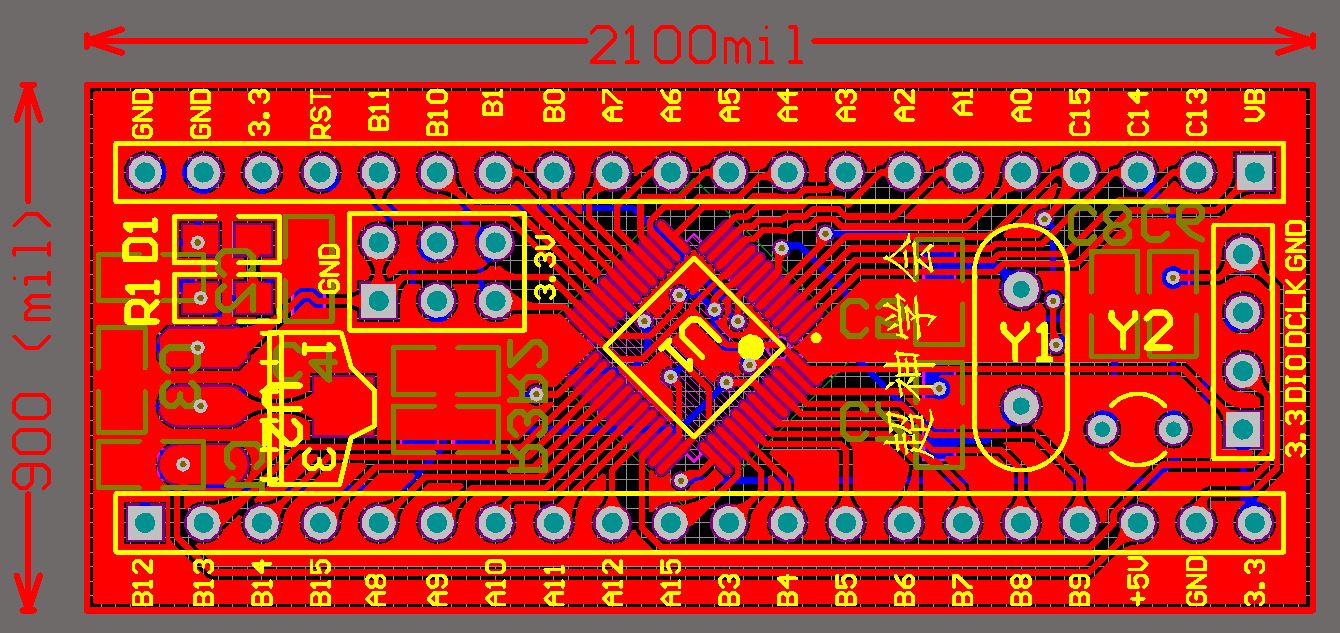
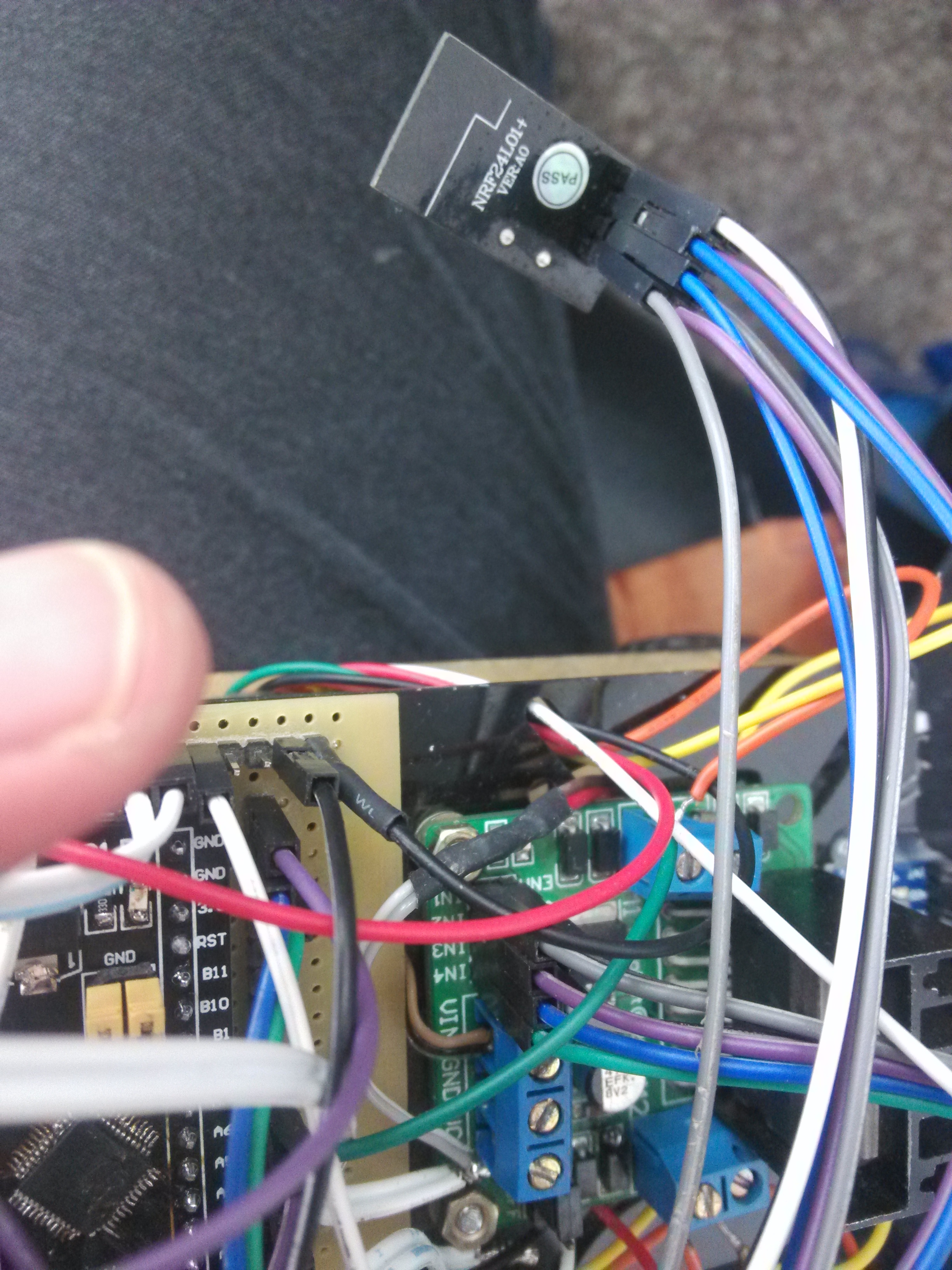
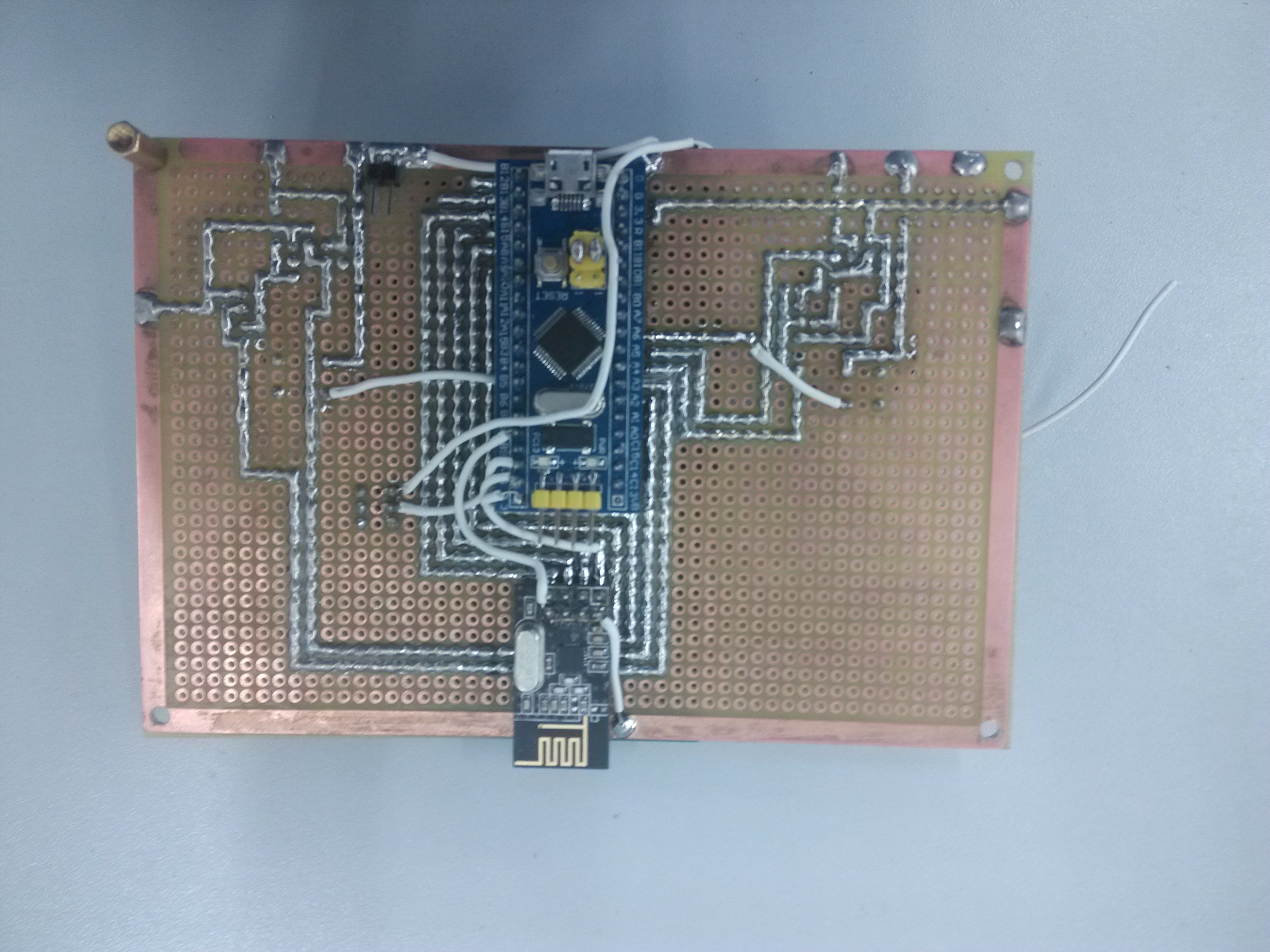
3、硬件设计
DIY平衡车的主控板自己PCB开板,经济实惠,其他的(NRF2401、NOKIA5110、L298N、MPU6050)一律采用网购产品,STM32F103C8T6主控板原理图,PCB,实物图如下:

4、器件采购
(1)MCU采用自己画的PCB主控板,总体价格一块板子只需要10元钱。

(2)电机驱动采用LN298,体积有点大,但用着挺简单的。
(3)角度传感器(陀螺仪mpu6050)。
(4)无线模块(NRF2401);
(5)无线遥控器(自己制作)。

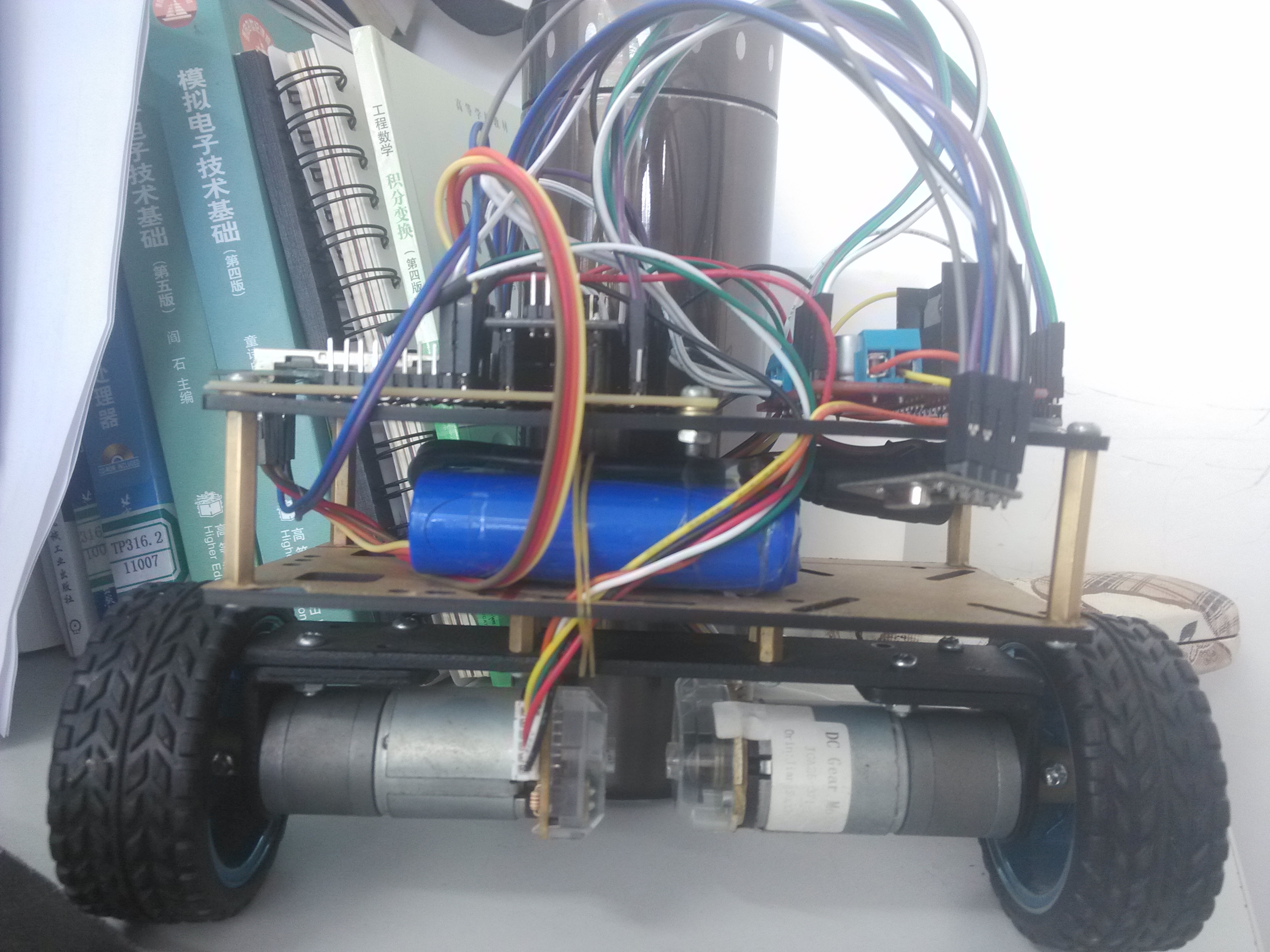
(6)电机以及小车的车体。(在淘宝上一家买的电机和车体);http://item.taobao.com/item.htm?spm=a1z09.2.9.106.sSnUOR&id=36950692279&_u=110sgvvs3e87

(7)最后一步小车组建成功。(该点赞的速度的)

 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32K3XX】FlexCAN 模块配置使用被打赏¥30元 | |
| 【S32K3XX】FlexCAN RAM 资源分配整理被打赏¥25元 | |
| 【S32K3XX】IPCF 适配核间中断处理被打赏¥21元 | |
| 【S32K3XX】IPCF 核间通讯模块UNMANAGED方式使用被打赏¥29元 | |
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

