
四轴飞行器对于刚刚入模的朋友来说是个很好的切入点,它制作成本相对较低,专业知识要求也不高。只要肯动手动脑多学习,自己制作一个四轴飞行器,这都不是个事!在最近的制作过程中,我找了很多资料,也走了不少弯路。在此和大家分享一下成功后的制作过程,希望能给遇到相同问题的模友一些帮助,也希望能和有相同爱好的朋友相互学习探讨进步。本教程参考了网上《超酷MWC四轴飞行器DIY全套教程,资料经验大放送!》、、《MWC接GPS和声纳的方法经验以及我遇到的问题》、《MWC的嫡系开源OSD系统KVTEAMOSD基于minimosd》等帖子内容,也加入了自己的一些理解和细节处理(红色字部分新手要留意!)。在此向这些大神表示感谢。说了一大堆,下面正式开工了!
一、采购清单:
关于飞控的选择刚开始也纠结了很久,最后还是选定现在国内外都非常火的开源四轴项目----Multiwii,这个项目包含的开源固件价格合适,性价比高,可拓展性强。适合动手能力强的初学者。原理逻辑不是本次介绍的重点,着重介绍是具体怎么安装过程。争取在最短的时间内顺利试飞。等四轴上天之后,大家再深入了解代码,飞行原理等等,这才是一个既有趣又学习的过程。下面给大家罗列一个入门级四轴飞行器的采购清单,这些都是我所用过,而且质量很不错的配件。准备好你的money了吗?,到taobao尽情SHOPPING吧!

买配件注意要点:淘宝上同类产品价格相差比较大,大家千万不要贪图便宜选低端货哦!否则买回来的配件出了问题你怎么都查不出来,费时费力,严重影响你对四轴研究的兴趣哦!给大家推荐两家我经常光顾的航模店吧:一个是新动模型(http://shop67525257.taobao.com),东西比较齐全,但价格要贵些!另一个是苍穹四轴飞行器DIY驿站(https://shop59774382.taobao.com),规模不如前者,但入门级配件特别是MWC的板子都比较齐全,价格实惠。
买好配件请告知卖家快马加鞭,否则你将强烈体会到等待是一种煎熬!呵呵
还要做好一个心理准备,就是配件到手了不要着急组装,先要初步测试一下,深层次的东西可能刚开始不可能完全测试到,但基本指示灯、显示等要正常吧!不要到组装进行时突然发现某样玩意不行或者根本不能用了,那个时候真要骂天!(本人因电池、电烙铁等原因,来来回回白白耗费了将近一个星期!时间是宝贵的啊!)下面就先给大家说说如何初步检测配件好坏!(不知道怎么排序了,挨个说吧!)
1. 电池
购买链接:
https://item.taobao.com/item.htm?spm=0.0.0.0.Uuf0X6&id=521989851150
本次买的电池有两种,给四轴飞行器供电的动力锂电池(2200mA、11.1V、25C、3S)和给天地飞7遥控器供电的锂控电电池(4000mA、3.7V、8C、1S) (天地飞7也可用4节干电池)。给它们充电的是B6平衡充电器。(有兴趣研究说明书的朋友可以先看看,貌似全TM是英文说明,好端端的国产货硬是没有配一张中文说明书)。心急的朋友到优酷视频搜一下,或则点链接: http://v.youku.com/v_show/id_XNTQxODkxNjMy.html?from=s1.8-1-1.2
2. 遥控器
购买链接:
遥控器有美国手和日本手之分,具体区别见淘宝产品介绍,根据个人喜好选择。装好电池,然后按住menu开机,,看看液晶屏是否有显示。选择“机型设置”——通过右边箭头选择“固定翼”,确定后按exit退出,重新开机即可。遥控器说明书要认真看看,为下面作准备。
3. 飞控+电调+电机
飞控购买链接:
https://item.taobao.com/item.htm?spm=a1z10.5-c.w4002-12256449691.15.Yv05uf&id=521463687276
https://item.taobao.com/item.htm?spm=a230r.1.14.137.8nnMIK&id=35340915405&ns=1&abbucket=8#detail
电调购买链接:
https://item.taobao.com/item.htm?spm=686.1000925.0.0.qNpCsr&id=521837741706
https://item.taobao.com/item.htm?spm=a1z10.3-c.w4002-2469634258.47.syd8qp&id=14110522569
电机购买链接:
https://item.taobao.com/item.htm?spm=a1z10.5-c.w4002-11204981660.12.LsYXXA&id=521826439722
https://item.taobao.com/item.htm?spm=a1z10.3-c.w4002-2469634258.16.obIY55&id=20349804060
4. 机架
机架购买链接:
https://item.taobao.com/item.htm?spm=a1z10.5-c.w4002-12256449691.13.kaqxov&id=521828641959
https://item.taobao.com/item.htm?spm=a1z10.3-c.w4002-2469634258.39.5B6vir&id=18132207528
看看机臂数量、螺丝、上下底板等是否齐全。4只机臂是否平直无弯曲变形。
5. 桨叶:
购买链接:
https://item.taobao.com/item.htm?spm=a1z10.5-c.w4002-12256449691.13.L7q0qv&id=522061509479
对于桨这种耗材来说,新手买便宜一些仿APC 1047桨才是最合适的,价钱合适,柔韧性强。切记不可买那些花花绿绿质量极差的桨,轻则导致飞行不稳,重则炸机损失惨重!切记!新手可以多备几套。
6. 工具及其他
电烙铁等工具就近的五金店均能买到,买到后看看能否正常使用。
零散小配件如隔离柱等在购买配件的时候一并买上,不然组装的时候固定不牢给以后的飞行带来隐患。
初步确定以上检查后,我们进入下一步!
二、四轴组装
这是一个比较快乐的过程,咱们一步一步来。
Step1:焊接底板
焊接之前大家最好先自个练习练习,或则搜优酷视频,很重要哦!第一步焊坏了,下面就没法继续了。当然初学者也可以多买一块底板作为备用,以防不测。(屌丝请静静飘过,抓紧烙铁练习)
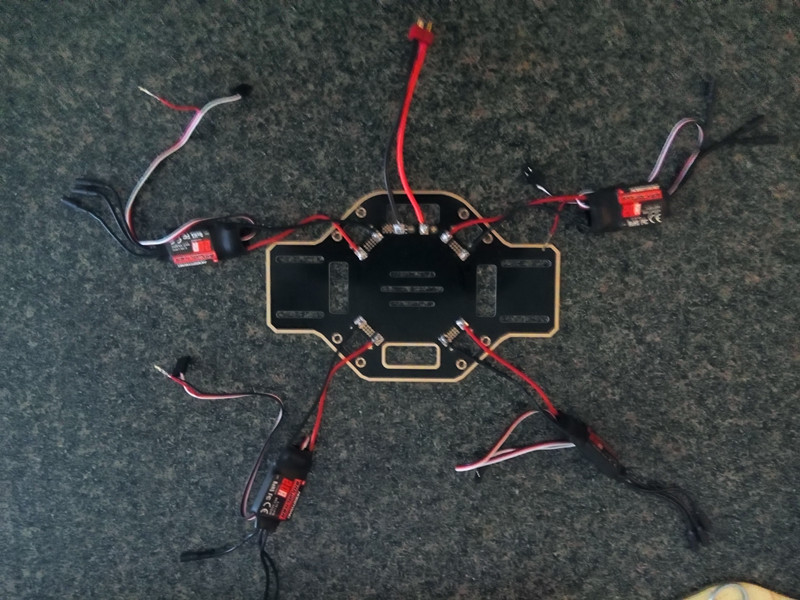
将电调电源线和电池电源线焊接到下底板相应位置上。注意别搞错正负极,也别弄短路。(将其中三个电调的信号线的红线取出,用绝缘胶带包裹好。因为后面接接收机只需要一组供电就可以了。)
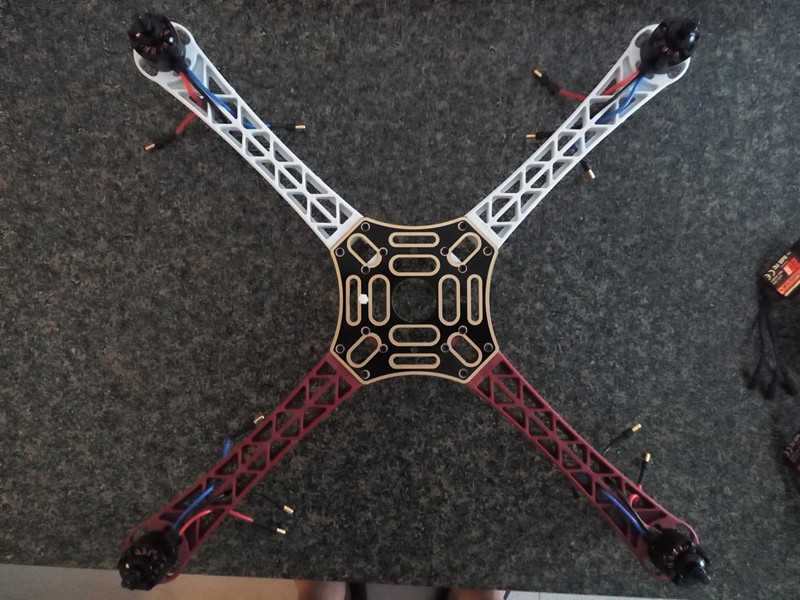
Step2:连接上底板和机臂及固定电机
Step3:上下底板组合
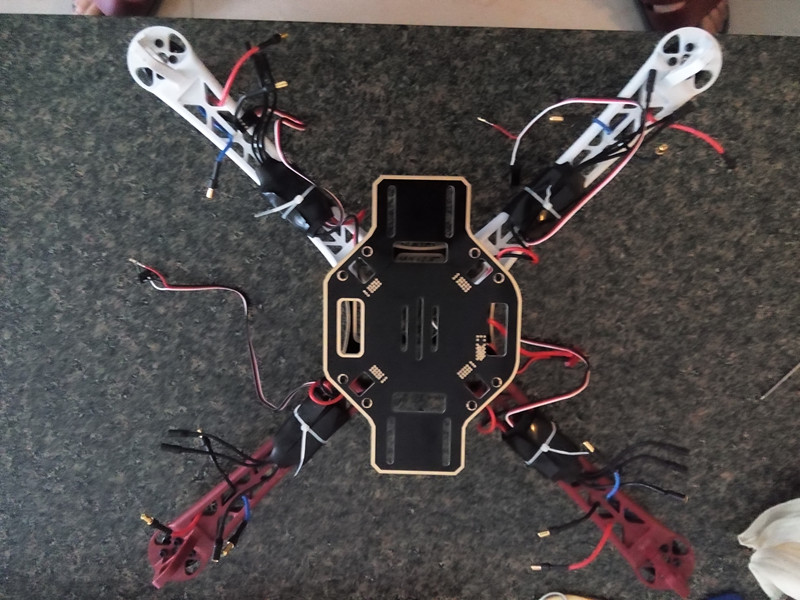
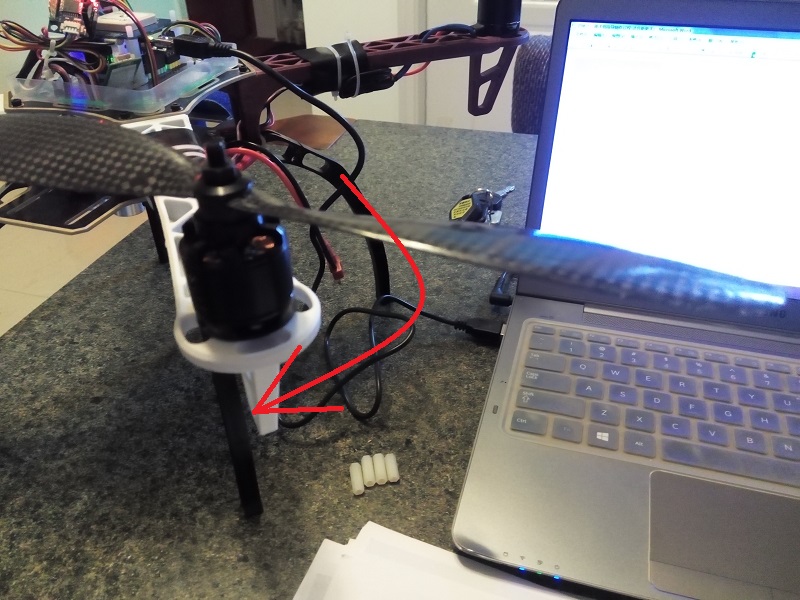
电调可以用东西包裹一下,便于扎带固定。四支机臂必须保证平整,电机固定牢固。否则以后四轴飞起来会产生很多问题,比如抖动等。
电调与电机先不要连接,因为电机还要调试正反转。
以上组装好了就先放一边。
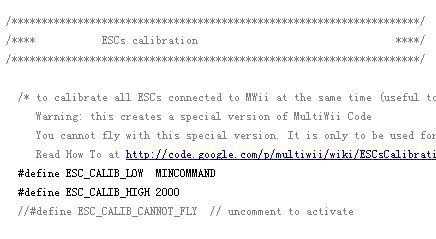
三、程序烧录
组装好动力系统及机架后,下面就是烧录程序及参数设置了:先到下面地址下载需要的软件及代码:http://pan.baidu.com/s/1gdCpjXL,下载后将FTDI驱动、JAVA等先安装上,安装软件应该没有什么好说的,只是Multiwii 的GUI程序需要JAVA虚拟机的支持(win7 64位的刚刚软件里已经有了,32位的需要在这个地址下载:http://java.com/zh_CN/download/manual.jsp?locale=zh_CN),如果你的电脑是win7 64位的系统,安装了JAVA虚拟机后GUI仍然运行不了,那你就需要到C:\Program Files\Java\jre7\bin\找到并复制javaw.exe,然后粘贴到C:\Windows\SysWOW64\这个文件夹下面,再重新运行GUI即可。
Step1:MWC飞控板程序烧录及安装
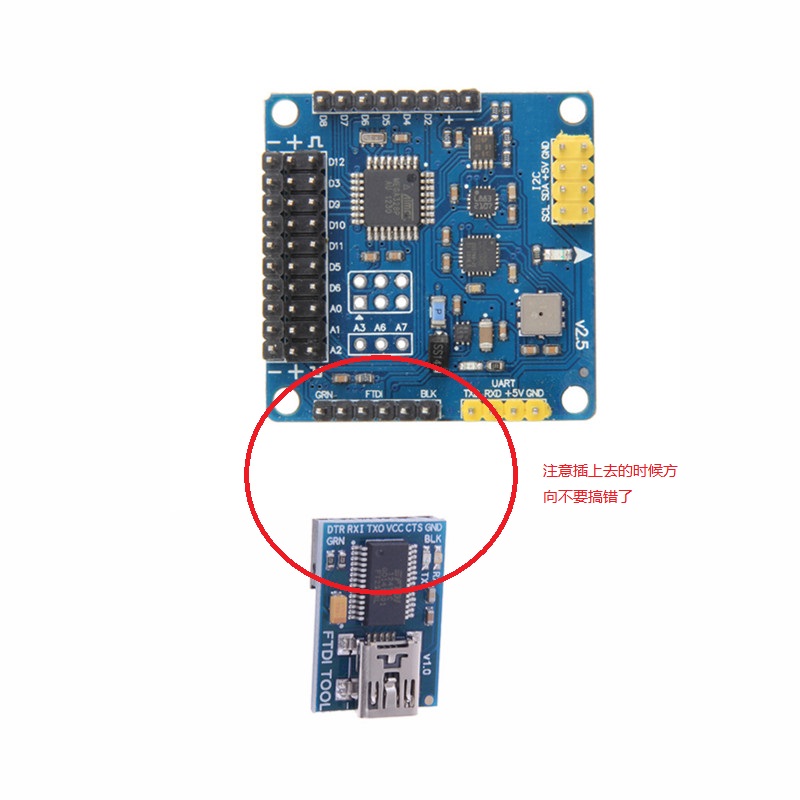
1. 用FTDI连接电脑和飞控,蓝色指示灯会闪烁后熄灭,绿灯会常亮;
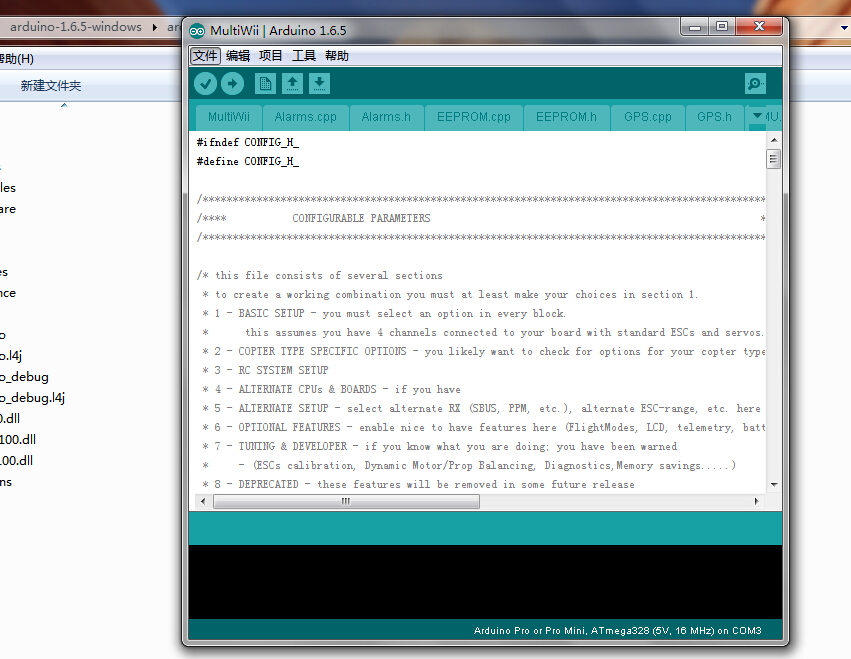
2.运行Arduino IDE,菜单“文件”—“打开”找到MultiWii_2_3\MultiWii文件夹下打开主程序MultiWii.ino,其他子程序会自动打开。如下所示:
最大化后选择倒数第三个子程序config.h。我们需要配置的只有config.h。
具体配置见下载文件《MultiWii程序设置》
注意:在FTDI连接飞控与电脑时,UART接口不能接蓝牙或则其他模块。否则上传代码会出现问题;以后连接GUI调试飞控的同时,UART也不能接模块,否则数据读不上来。
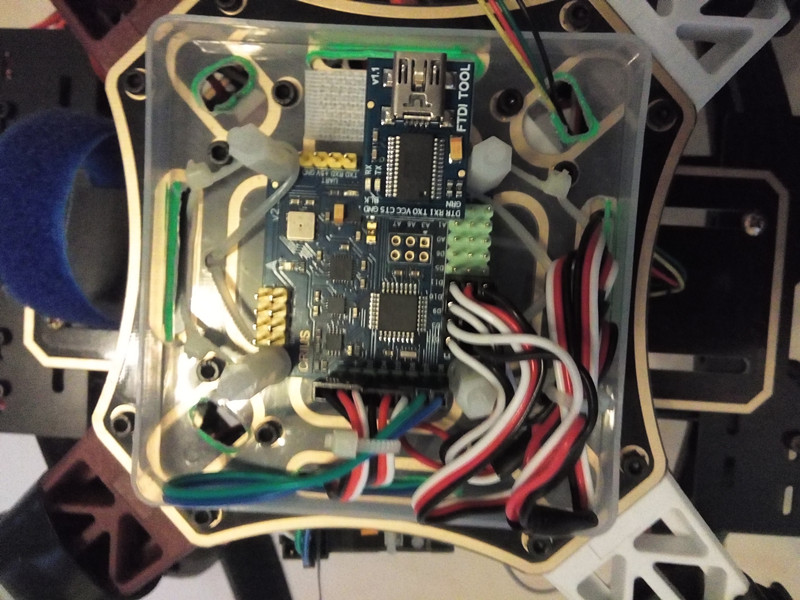
代码上传成功后,我们在飞控板背面粘上厚一点的3M泡沫双面胶或则魔术贴,如果能加一块减震硅胶PU胶更好,减少机体振动对传感器的影响。将飞控板粘到机架上底板中央,一定要注意位置置中,与机架方向对齐。注意飞控板的飞行方向(蓝灯所在箭头方向)和四轴机头方向(红色机臂角平分线方向)要对齐重合。飞控板要尽量安放在上底板的中央。见下图:
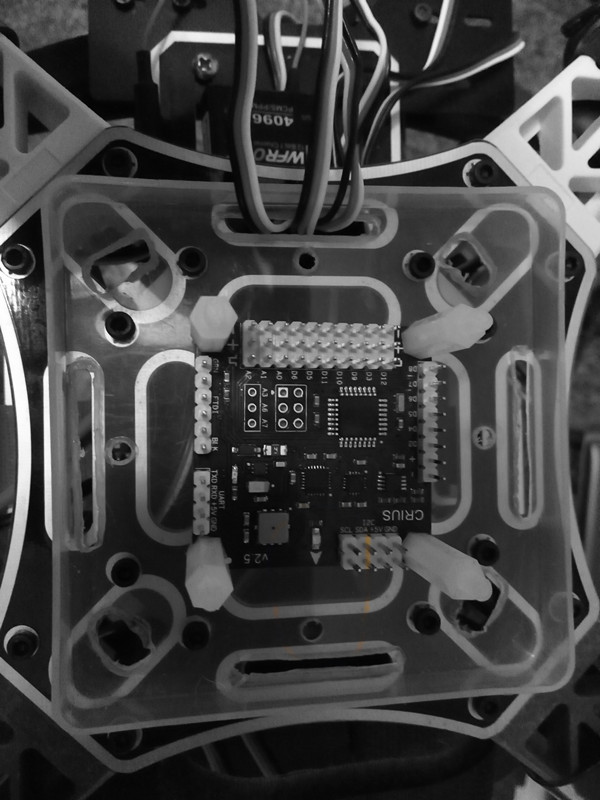
并且要固定牢固,否则在飞行过程中,振动会导致传感器数据跳跃,飞控移位或接触不良,会导致非常严重的问题。新手一定要注意这些小问题,细节决定成败哦!!
Step2:MWC飞控板与遥控接收器的连接
首先要大致浏览一下天7的说明书,下面是天7的接收机图示:
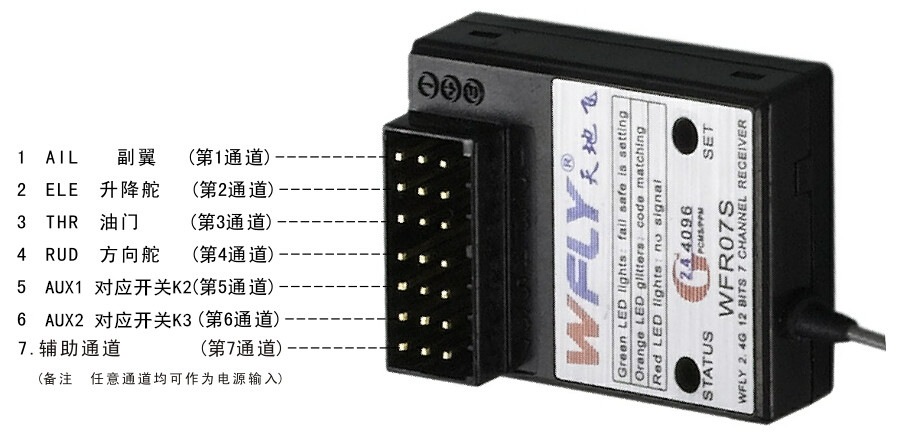
按照图中各通道的功能,将接收机和飞控板连接起来,这里先连接6个通道:
飞控板
接收机
D2 (THRO) ---------
油门(第3通道)
D4 (ROLL) ---------
副翼(第1通道)
D5 (PITCH) ---------
升降舵(第2通道)
D6 (YAW) --------- 方向舵(第4通道)
D7(AUX1) ----------
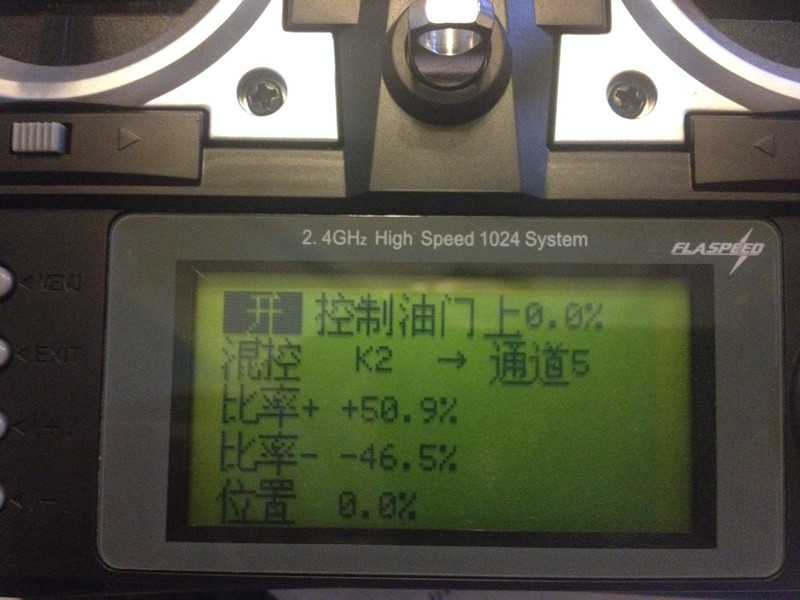
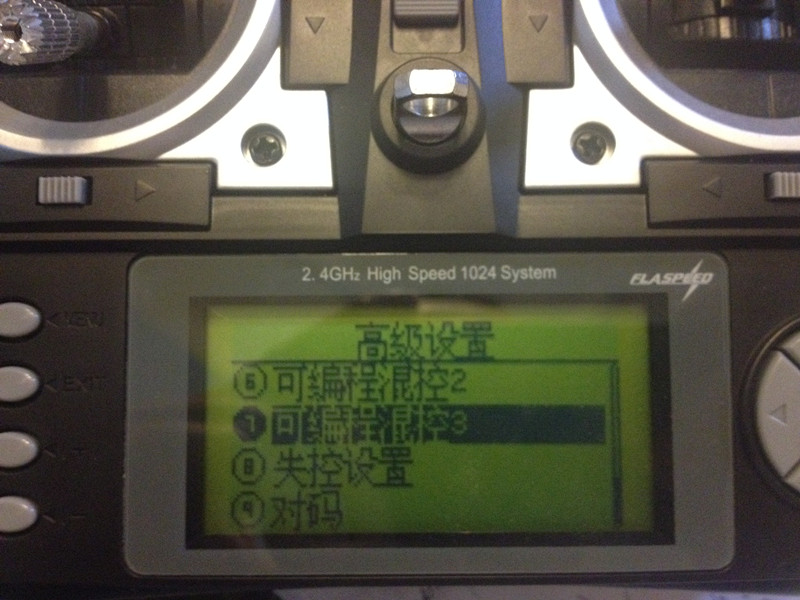
模式切换1(第5通道,设置三档开关K2之后用来切换飞行模式)具体设置见后面
D8(AUX2) --------- 模式切换2(第6通道,设置三档开关K3之后用来切换飞行模式)具体设置见后面
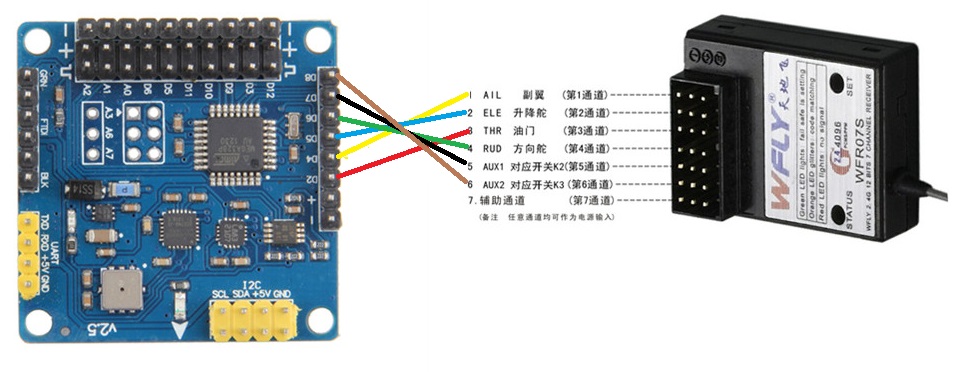
注意:接收机只需要一个通道供电就可以了,红色为+5V,黑色为GND,白色为PPM信号。其余通道只需要接信号线那个针脚,正负针脚不要接线。
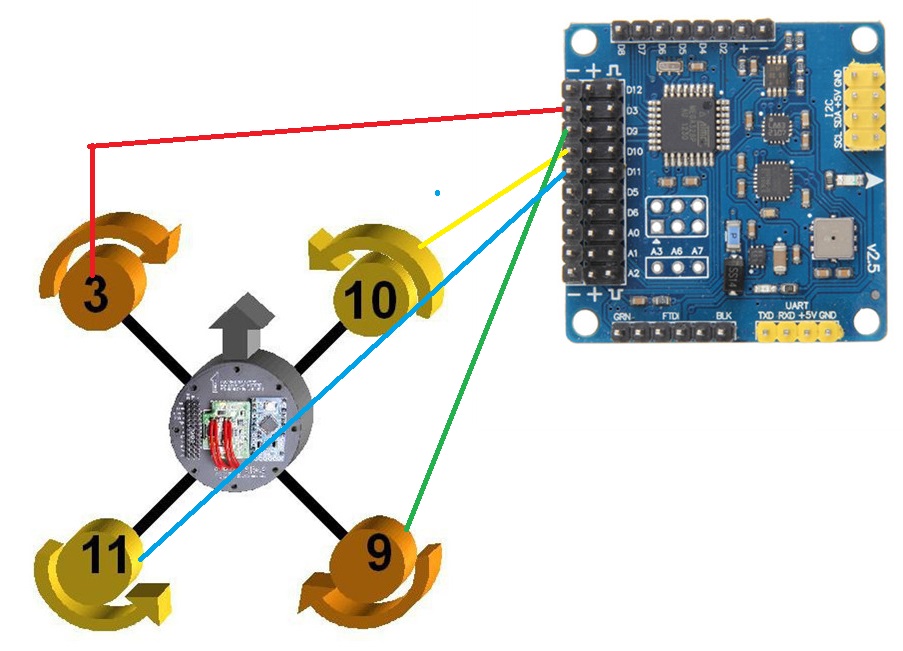
Step3:MWC飞控板与电调的连接
电调自身带信号线:红色为+5V,黑色为GND,白色为PPM信号。整个机体来看,按照机头方向将四个电机分为:
D3---左前(3号电机,顺时针旋转)
D9---右后(9号电机,顺时针旋转)
D10---右前(10号电机,逆时针旋转)
D11---左后(11号电机,逆时针旋转)
3号电机信号线连接飞控板输出部分3号排针,10号电机连接10号排针,11号电机连接11号排针,9号电机连接9号排针。需要注意的是:飞控板由电调供电,有四个电调,但不能让四个电调并联供电,会引起故障。所以必须切断其中三个电调的+5V供电线。只留一个电调给飞控板供电。如下图所示:
连接好之后如下图所示
用扎带将线扎紧排列整齐,再用电池扎带将电池固定在下底板上,那整架飞机就算初步组装完成了。
接下来调试参数!






 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

