
一、概述 http://forum.eepw.com.cn/thread/277164/1/#3
二、开箱和组装http://forum.eepw.com.cn/thread/277164/1/#4
三、完成展示http://forum.eepw.com.cn/thread/277164/1/#5
四、基础实验
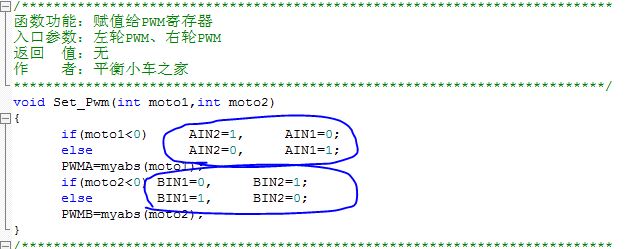
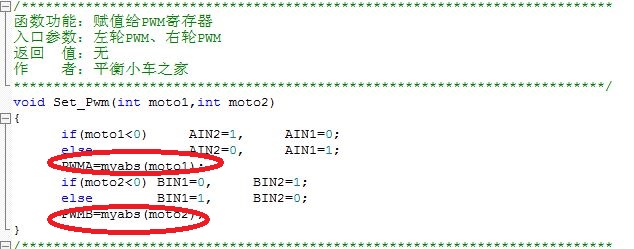
4.1 电机驱动实验http://forum.eepw.com.cn/thread/277164/1/#6
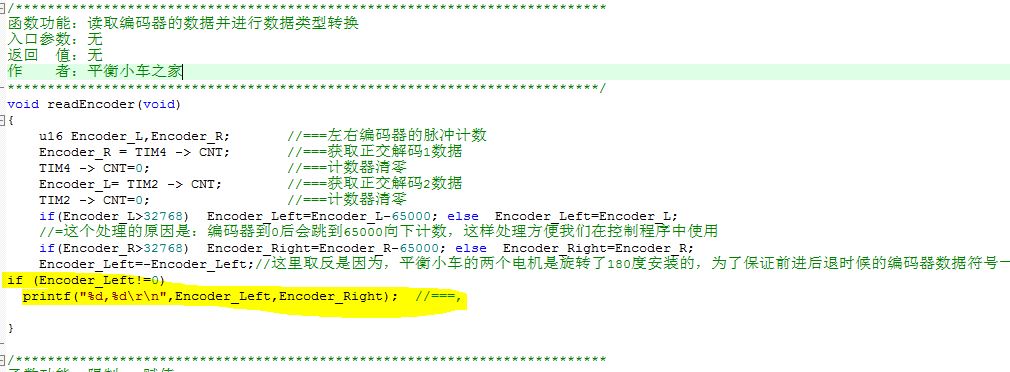
4.2 编码器数据采集实验 http://forum.eepw.com.cn/thread/277164/1/#7
4.3.无线通讯实验http://forum.eepw.com.cn/thread/277164/1/#8
4.4 传感器驱动实验 http://forum.eepw.com.cn/thread/277164/1/#9
5.高级实验
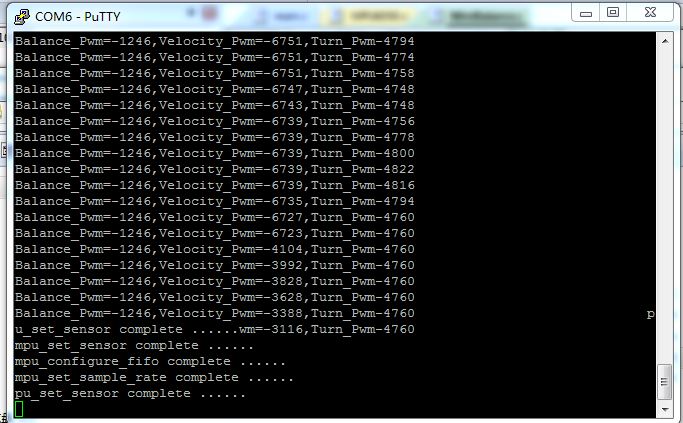
5.1.多传感器数据融合http://forum.eepw.com.cn/thread/277164/1/#10
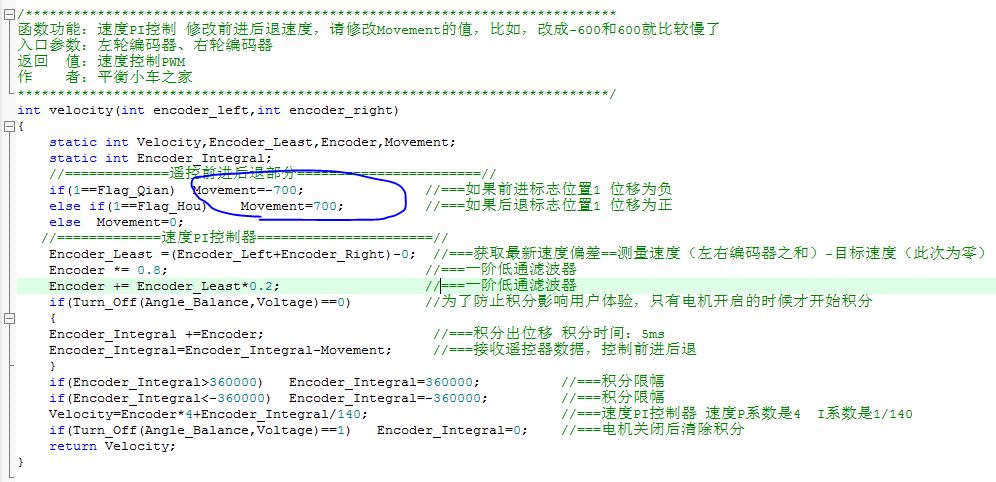
5.2 PID调试http://forum.eepw.com.cn/thread/277164/2/#11
5.2 PID调节补充试验和分析http://forum.eepw.com.cn/thread/277164/2/#12
5.3.实现平衡小车直立时处于静止状态 http://forum.eepw.com.cn/thread/277164/2/#13
5.4.实现平衡小车绕八字行走http://forum.eepw.com.cn/thread/277164/2/#14
5.5.实现小车自主避障http://forum.eepw.com.cn/thread/277164/2/#16
5.6 实现小车利用线性CCD巡线 以及实现体感控制(利用KINECT或者姿态传感器)分析http://forum.eepw.com.cn/thread/277164/2/#18
6 小结http://forum.eepw.com.cn/thread/277164/2/#19
7 手机APP之蓝牙通信开发http://forum.eepw.com.cn/thread/277164/2/#20

 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

