
直流电机速度位置双环控制简明教程
1.速度闭环控制
我们一般在速度闭环控制系统里面,使用增量式PI控制。而在我们的微处理器里面,因为控制器是通过软件实现其控制算法的,所以必须对模拟调节器进行离散化处理,这样它只需根据采样时刻的偏差值计算控制量。因此,我们需要使用离散的差分方程代替连续的微分方程。
假定采样时间很短时(我们的代码中是10ms),可做如下处理:
① 用一介差分代替一介微分;
② 用累加代替积分。
根据增量式离散PID公式
Pwm+=Kp[e(k)-e(k-1)]+Ki*e(k)+Kd[e(k)-2e(k-1)+e(k-2)]
e(k):本次偏差
e(k-1):上一次的偏差
e(k-2):上上次的偏差
Pwm代表增量输出
在我们的速度控制闭环系统里面只使用PI控制,因此对PID控制器可简化为以下公式:
Pwm+=Kp[e(k)-e(k-1)]+Ki*e(k)
具体通过C语言实现的代码如下:
int Incremental_PI (int Encoder,int Target)
{
float Kp=100,Ki=100; //PI参数由电机的种类和负载决定
static int Bias,Pwm,Last_bias;
Bias=Encoder-Target; //计算偏差
Pwm+=Kp*(Bias-Last_bias)+Ki*Bias; //增量式PI控制器
Last_bias=Bias; //保存上一次偏差
return Pwm; //增量输出
}
入口参数为编码器的速度测量值和速度控制的目标值,返回值为电机控制PWM。
第一行代码为PI参数的定义,PI参数在不同的系统中不一样,我们的代码中的PID参数,仅针对平衡小车之家的电机空载时调试得到。
第二行是相关内部变量的定义。
第三行是求出速度偏差,由测量值减去目标值。
第四行使用增量PI控制器求出电机PWM。
第五行保存上一次偏差,便于下次调用。
最后一行是返回。
在10ms定时中断里面调用该函数实现我们的控制目标:
Moto1=Incremental_PI(Encoder,Target_velocity);
Set_Pwm(Moto1); //===赋值给对应MCU的PWM寄存器
具体请结合完整代码理解,我们的代码基于STM32F103C8控制器,但是把基于C语言的PID控制器部分剥离,并放在control.c里面,故对STM32不熟悉的同学依然可以使用记事本打开这个文件观看。
2.位置闭环控制
根据位置式离散PID公式
Pwm=Kp*e(k)+Ki*∑e(k)+Kd[e(k)-e(k-1)]
e(k):本次偏差
e(k-1):上一次的偏差
∑e(k):e(k)以及之前的偏差的累积和;其中k为1,2,,k;
Pwm代表输出
在我们的位置控制闭环系统里面只使用PI控制,因此对PID控制器可简化为以下公式:
Pwm=Kp*e(k)+Ki*∑e(k)
具体通过C语言实现的代码如下:
int Position_PI (int Encoder,int Target)
{
float Kp=15,Ki=0.01;
static int Bias,Pwm,Integral_bias;
Bias=Encoder-Target; //计算偏差
Integral_bias+=Bias; //求出偏差的积分
Pwm=Kp*Bias+Ki*Integral_bias; //位置式PI控制器
return Pwm; //增量输出
}
入口参数为编码器的位置测量值和位置控制的目标值,返回值为电机控制PWM。
第一行代码为PI参数的定义,PI参数在不同的系统中不一样,我们的代码中的PID参数,仅针对平衡小车之家的电机空载时调试得到。
第二行是相关内部变量的定义。
第三行是求出速度偏差,由测量值减去目标值。
第四行通过累加求出偏差的积分。
第五行使用位置式PI控制器求出电机PWM。
最后一行是返回。
在10ms定时中断里面调用该函数实现我们的控制目标:
Moto1=Position_PI(Encoder,Target_position);
Set_Pwm(Moto1); //===赋值给PWM寄存器
具体请结合完整代码理解。
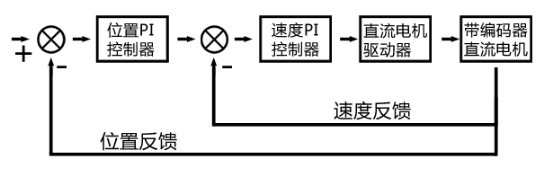
3.速度位置双环控制
速度位置双环控制由以上两个控制器进行嵌套,具体原理不再细讲,只对核心代码进行讲解:
Encoder=Read_Encoder(2);
Position+=Encoder;
Moto1=Position_PI(Position,Target_position);
Moto1=Incremental_PI(Encoder,-Moto1);
第一行是通过M法测速获得电机速度。
第二行是通过累加求出速度的积分,也就是电机的位置信息。
第三行是位置外环控制器,求出控制输出量,作为速度内环的控制目标值。
第四行是速度内环。
因为双环控制过程较复杂,故给出其控制原理图如下:
附件所给的代码都经过测试,如果同学们测试的时候发现不能实现控制目标,请对调编码器的AB相。
笔者水平有限,有错误之处请批评指出,以上内容由平衡小车之家原创,转载或引用请注明出处。
来点干货,以下是相关的代码和原理图,取消了网盘链接,上传了附件,直接下载即可
下载附件:——回复可见内容——
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

