
最近在某论坛裡,看到qq280572 大大的这篇 STM32F103+DM9051_UIP_SPI to 以太网,透过qq280572弄到了几块DM9051NP 以太网卡,刚好手上有Nuvoton NuTiny M051 和 M451,就先用M051拿来做一个简单的web server,透过web server 来控制开发板上的LED灯亮灭。
1. DM9051NP硬体相关描述
DM9051NP SPI介面网卡芯片是聯傑國際(DAVICOM)为了方便MCU单片机系统进行乙太网通信而开发出的解决方案。DM9051NP晶片是带有行业标准串列外设介面(Serial Peripheral Interface,SPI)的独立乙太网控制器。DM9051NP符合IEEE 802.3 规范,它还支援以DMA 模式來传输,以实现资料传送快速。DM9051NP通过1个中断引脚和SPI介面來进行与主控制器/MCU单片机的通信,资料传输规格为10/100 M。相關介紹可以參考STM32F103+DM9051_UIP_SPI to 以太网。• Package:32支接脚封装,QFN.
• IEEE 802.3az Energy Efficient Ethernet (EEE)
• Built-in integrated 3.3V to 1.8V regulator
• 远端唤醒 (WOL)
• 平行线/交叉线自动切换 HP Auto-MDIX
• Support 光口介面
• 具有16KB SRAM静态随机存取记忆
• EMI (Class B) and HBM ESD Rating 8KV
• 工业温度规范: –40℃ to +85℃
• 功率:(100/10 M) => 429/561 mW
• 连续工作温度<60℃
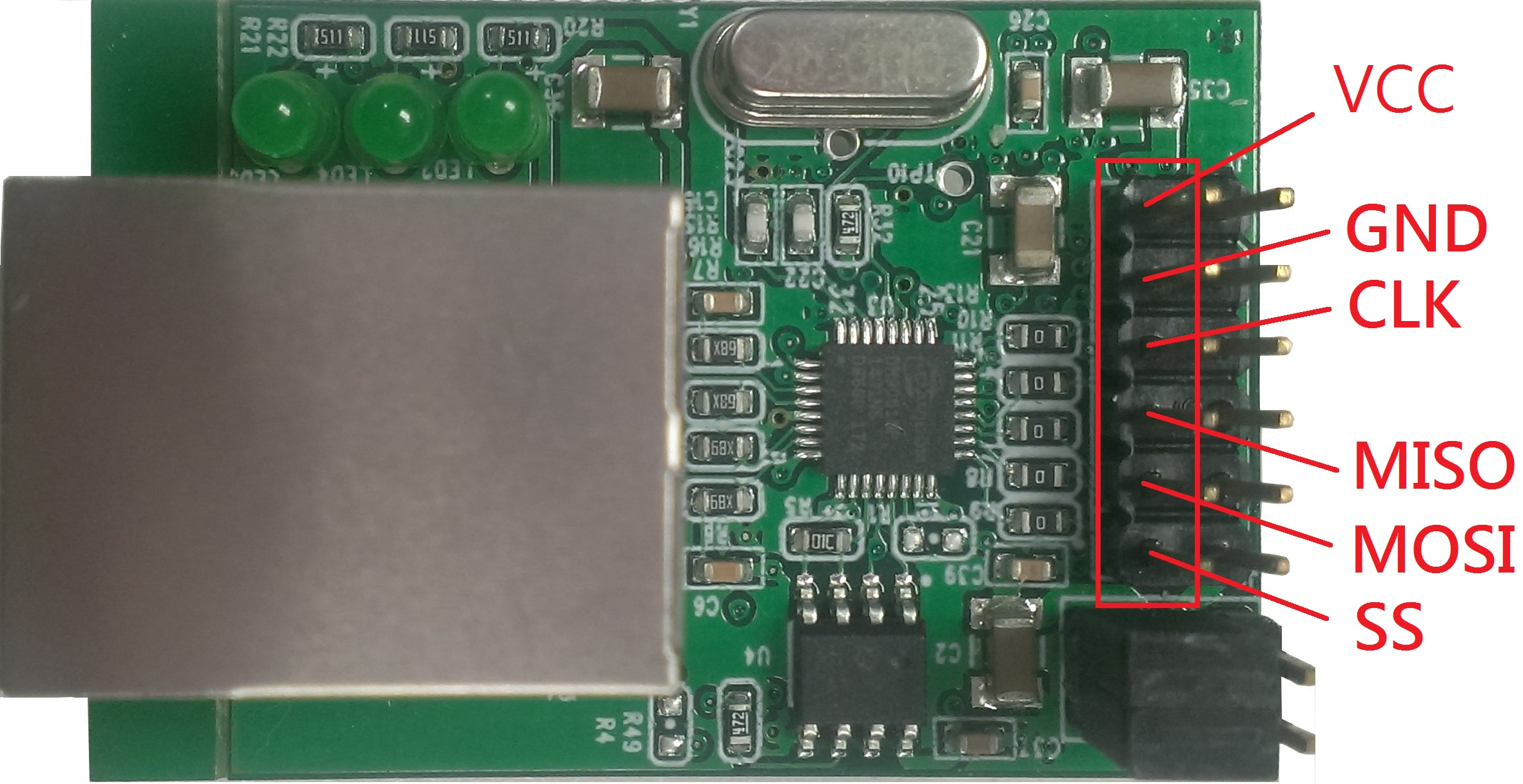
上图是DAVICOM(聯傑國際) DM9051NP 以太网路卡SPI Pin的排列
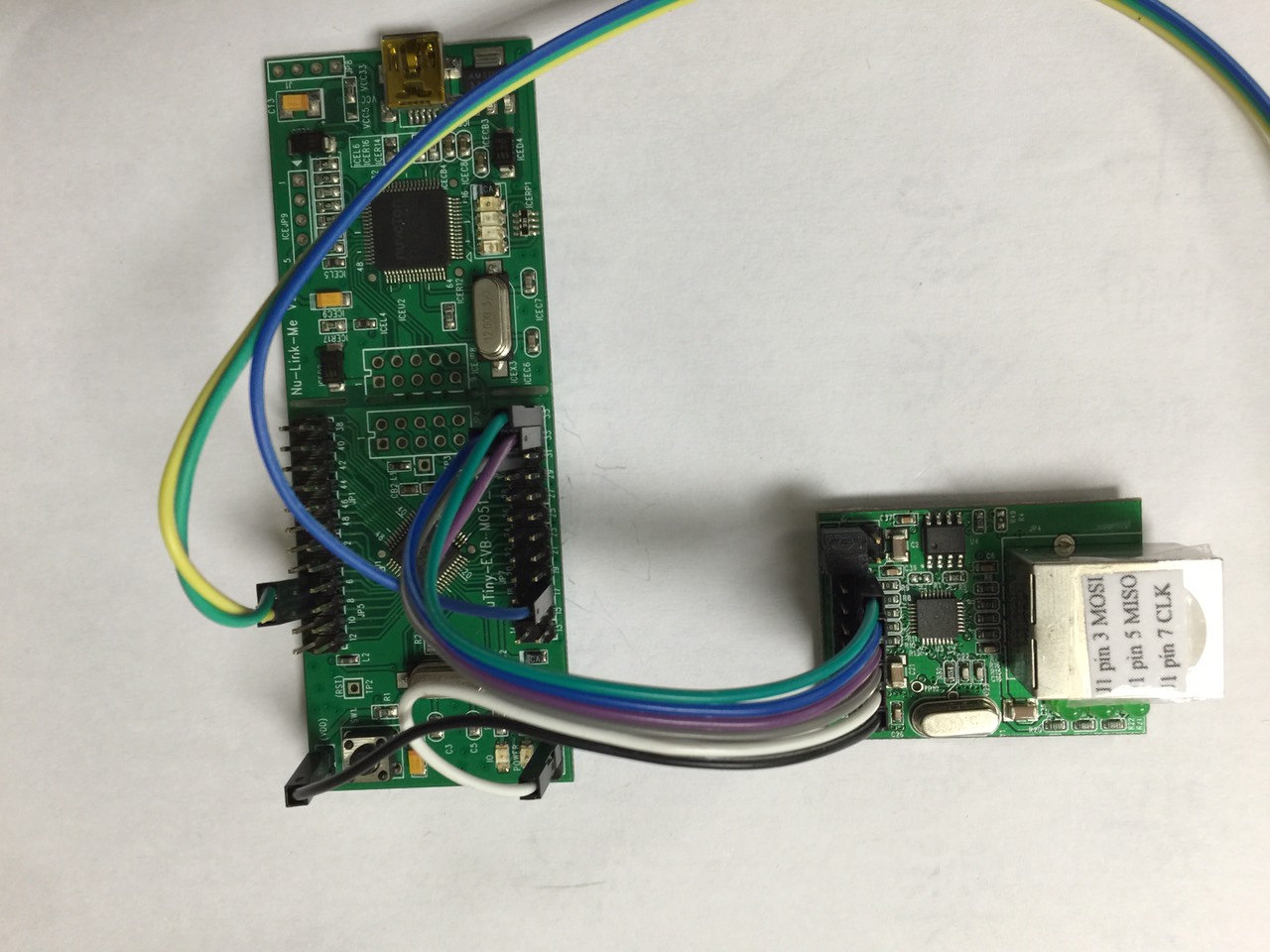
NuTinyM051使用的是SPI1与DM9051NP SPI脚位的硬体连接如下:
| M0516 | DM9051 |
| P0.7(Pin32) | CLK (pin07) |
| P0.6(Pin33) | MISO (Pin05) |
| P0.5(Pin34) | MOSI (Pin03) |
| P0.4(Pin35) | CSS (Pin01) |
2.网卡驱动:
SPI 设定和 R/W data 参考M0516 Library SPI_Loopback sample code 可到nuvoton 官网下载M0516 Library, 再参考STM32F103+DM9051_UIP_SPI to 以太网附件中的驱动,将DM9051_Configuration() SPI设定改为M0516 SPI1 Pin Group 设定和修改DM9051_Read_Reg(), DM9051_Write_Reg(), DM9051_Read_Mem(), DM9051_Writer_Mem() , 修改如下:。
(1) 首先配置M0516 SPI1 相关设定:
void DM9051_Configuration(void)
{
/* Enable SPI1 peripheral clock */
CLK_EnableModuleClock(SPI1_MODULE);
/* Select HCLK as the clock source of SPI1 */
CLK_SetModuleClock(SPI1_MODULE, CLK_CLKSEL1_SPI1_S_HCLK, MODULE_NoMsk);
/* Reset IP */
SYS_ResetModule(SPI1_RST);
/* Setup SPI1 multi-function pins */
SYS->P0_MFP = SYS_MFP_P04_SPISS1 | SYS_MFP_P05_MOSI_1 | SYS_MFP_P06_MISO_1 | SYS_MFP_P07_SPICLK1;
/*--------------------------------*/
/* Init SPI */
/*--------------------------------*/
/* Configure SPI1 as a master, SPI clock rate 200 KHz,clock idle low, 32-bit transaction, drive output on falling clock edge and latch input on rising edge. */
SPI_Open(SPI1, SPI_MASTER, SPI_MODE_0, 8, 25000000);
/* Disable the automatic hardware slave selection function. Select the SPI1_SS pin and configure as low-active. */
SPI_DisableAutoSS(SPI1);
SPI_EnableFIFO(SPI1, 3, 3);
}
(2) 透过read cmd 读出register
uint8_t DM9051_Read_Reg(uint8_t Reg_Off)
{
SPI_SET_SS_LOW(SPI1);
/* SPI transfer DM9051 Read-Command and Reg. offset. */
while(SPI_GET_TX_FIFO_FULL_FLAG(SPI1));
SPI_WRITE_TX0(SPI1, Reg_Off); //Read command + Register offset address
while(SPI_IS_BUSY(SPI1));
SPI_WRITE_TX0(SPI1, 0x0); //Dummy for read register value.
while(SPI_IS_BUSY(SPI1));
SPI_READ_RX0(SPI1); // dummy read, jump 1st byte.
SPI_SET_SS_HIGH(SPI1);
return (SPI_READ_RX0(SPI1) & 0xFF);
}
(3)透过write cmd 写入registervoid DM9051_Write_Reg(uint8_t Reg_Off, uint8_t spi_data)
{
uint32_t cmdaddr;
cmdaddr = (Reg_Off | 0x80);
SPI_SET_SS_LOW(SPI1);
/* SPI transfer DM9051 Read-Command and Reg. offset. */
SPI_WRITE_TX0(SPI1, cmdaddr); //Read command + Register offset address
while(SPI_IS_BUSY(SPI1));
SPI_WRITE_TX0(SPI1, (uint32_t)spi_data);
while(SPI_IS_BUSY(SPI1));
/*Clear SPI TX FIFO*/
SPI_ClearRxFIFO(SPI1);
SPI_SET_SS_HIGH(SPI1); // Set CSS High
return;
}
(4) 连续读出 data 从spi array
void DM9051_Read_Mem(uint8_t* pu8data, uint32_t datalen)
{
uint32_t i;
uint8_t burstcmd = SPI_RD_BURST; /* Read SPI_Data_Array back from the slave */
SPI_SET_SS_LOW(SPI1);
SPI_WRITE_TX0(SPI1, (uint32_t)burstcmd);
while(SPI_IS_BUSY(SPI1));
SPI_READ_RX0(SPI1);
for(i = 0 ; i < datalen; i++) {
pu8data = SPI_WRITE_TX0(SPI1, (uint32_t )0x0);
while(SPI_GET_RX_FIFO_EMPTY_FLAG(SPI1));
pu8data = (uint8_t)SPI_READ_RX0(SPI1);
}
while(SPI_IS_BUSY(SPI1));
/*Clear SPI TX FIFO*/
SPI_ClearTxFIFO(SPI1);
SPI_SET_SS_HIGH(SPI1);
}
(5) 连续写入data到spi array
void DM9051_Write_Mem(uint8_t* pu8data, uint32_t datalen)
{
uint32_t i;
uint8_t burstcmd = SPI_WR_BURST; // Send the array to the slave
SPI_SET_SS_LOW(SPI1);
SPI_WRITE_TX0(SPI1, (uint32_t)burstcmd);
while(SPI_IS_BUSY(SPI1));
SPI_READ_RX0(SPI1);
for(i = 0; i < datalen; i++) {
while(SPI_GET_TX_FIFO_FULL_FLAG(SPI1));
SPI_WRITE_TX0(SPI1, (uint32_t)pu8data);
}
while(SPI_IS_BUSY(SPI1));
/*Clear SPI RX FIFO*/
SPI_ClearRxFIFO(SPI1);
SPI_SET_SS_HIGH(SPI1);
}
uIP就不多介绍了,网路上有许多相关资料可以参考,在上一部份将驱动设置好后,將tapdev_init()、tapdev_read()、tapdev_send()對應到DM9051_init()、DM9051_rx()、DM9051_tx() function即可, 附件可參考,在main()中加入在 http_init(); 然后在http.c 在handle_input中天加 控制 LED function,新增web_led.c 和web_led.h 如下:
(1)首先先在 http.c handle_input()新增判斷
static PT_THREAD(handle_input(struct httpd_state *s))
{
PSOCK_BEGIN(&s->sin);
PSOCK_READTO(&s->sin, ISO_space);
if(strncmp(s->inputbuf, http_get, 4) != 0) {
PSOCK_CLOSE_EXIT(&s->sin);
}
PSOCK_READTO(&s->sin, ISO_space);
if(s->inputbuf[0] != ISO_slash) {
PSOCK_CLOSE_EXIT(&s->sin);
}
if(s->inputbuf[1] == ISO_space) {
strncpy(s->filename, http_webMain_html, sizeof(s->filename));
}
#if 1 //web 控制LED
/* Control led, 0 = OFF, 1 = ON, 2 = Flash */
else if (s->inputbuf[3] == 'L','E','D' && ((s->inputbuf[4] == '0') ||
(s->inputbuf[4] == '1') || (s->inputbuf[4] == '2'))){
Set_LED_mode(s->inputbuf[4]);
s->inputbuf[4]= 0;
strncpy(s->filename, http_webMain_html, sizeof(s->filename));
}
#endif
else {
s->inputbuf[PSOCK_DATALEN(&s->sin) - 1] = 0;
strncpy(s->filename, &s->inputbuf[0], sizeof(s->filename));
}
/* httpd_log_file(uip_conn->ripaddr, s->filename);*/
s->state = STATE_OUTPUT;
while(1) {
PSOCK_READTO(&s->sin, ISO_nl);
if(strncmp(s->inputbuf, http_referer, 8) == 0) {
s->inputbuf[PSOCK_DATALEN(&s->sin) - 2] = 0;
/* httpd_log(&s->inputbuf[9]);*/
}
}
PSOCK_END(&s->sin);
}
(2)LED 设定和控制判断代码如下:
void Set_LED_mode(char lkkcode)
{
//int i;
GPIO_SetMode(P3, BIT6, GPIO_PMD_OUTPUT); // Set LED, GPIO Group 3 bit 6
if(lkkcode == ('0')) // LED off
{
P36 = 1;
}else if (lkkcode == '1'){ //LED on
P36 = 0;
}else if(lkkcode == '2') // LED Flash
{
//for(i = 0 ; i< 30 ; ++i)
{
P36 = 0;
Delay(25);
P36 = 1;
Delay(25);
}
}
}

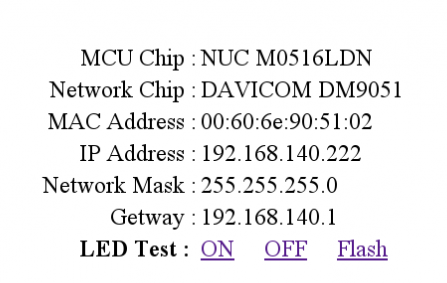
就可以透过web 控制LED,如下可以看到MCU + DM9051相关讯息,最下面可以看到控制LED 选单,
按下on 、off 、Flash后网址后面会分别显示XXX.XXX.XXX.XXX / LED0、1、2让使用者可以知道目前设定
 以上完成后就是一个简单webserver 控制LED应用了,最後附上程序和DM9051NP datasheet:
以上完成后就是一个简单webserver 控制LED应用了,最後附上程序和DM9051NP datasheet:
DM9051(I)-12-MCO-DS-P01_03302015.pdf
NUC_M051_uIP_SPI1_DM9051_webserver.rar
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

