
我们先从寻迹、遥控和避障做起,
然后尝试在此基础上进行优化并添加一些功能,
比如说添加显示屏、设定速度、按照一定比例尺在手机上设定终点或路线让小车自动行驶。
因此我们需要使寻迹、遥控、避障、显示等部分相互协调,可能会做一个双系统(两个单片机)并将电机的数据反馈到手机。
材料今天下单了,周三应该会到。现在正在看买到的红外模块的参数,然后开始写寻迹的程序。
制作的思路和过程将会详细更新。
先做红外寻迹。
材料还在路上,现在准备一下。
寻迹要用到的模块有:TCRT5000红外模块、LM2596S-ADJ降压模块、L298N电机驱动板模块、单片机最小系统版。

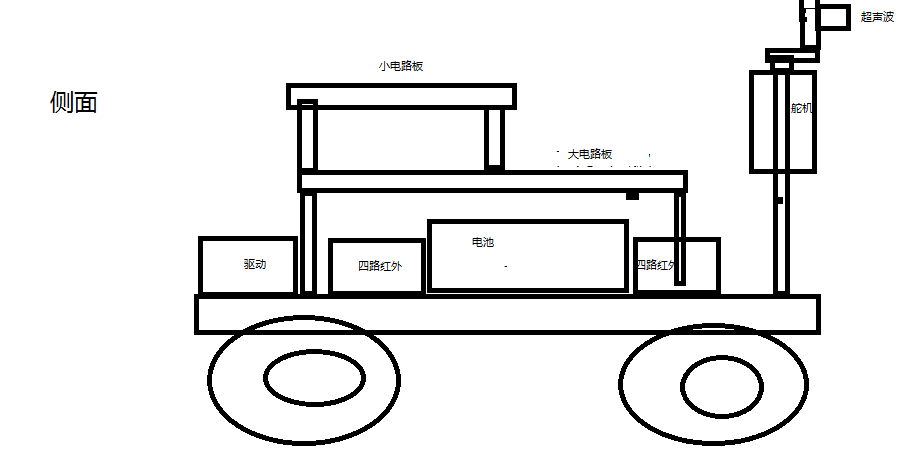
这是结构,黑线是电能,红线是信号。
我们分工每个人负责把一个模块弄清楚,下面是我负责的红外模块。
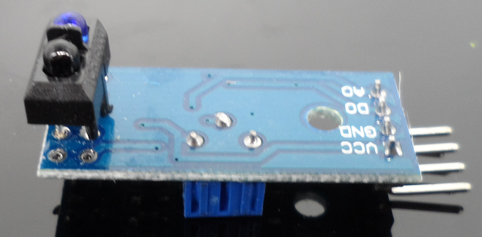

它主要包括两个部分,TCRT5000黑白检测和LM393电压比较器。
每个模块都有一个发光管和感光管,照到黑线光被吸收,感光管就检测不到,反之能检测到。感光管在这两种情况分别对应短路和断路,因此会影响到端口电压的变化,再通过电压比较器来将两种不同的电压转化为0和1,进而传递给单片机。

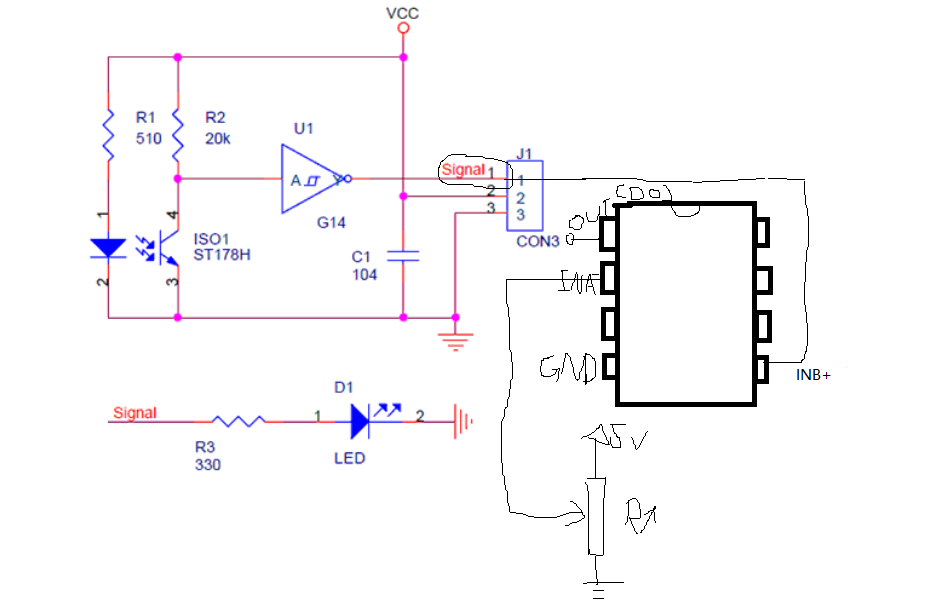
这是整个红外模块的原理图
左边是黑白检测,右边是电压比较器,黑白检测输出的高或低电压接到右边的比较器的INB+口,通过比较INB+与INA-点位的高低来确定OUT(就是模块的实物图上的DO口)输出0还是1,当INB+>INA-输出1,当INB+
 这是LM393管脚排列
这是LM393管脚排列

这是LM393实物图
接下来说具体数据和方法
用于黑白线检测
1mm~8mm适用,焦点距离为2.5mm
工作电压3.3V-5V,推荐5V
输出形式 :DO口输出数字开关量(0和1)
尺寸:3.2cm x 1.4cm

模块上有四个引脚 ,其中AO不用管,我们用不上
,其中AO不用管,我们用不上
调试方法:
用杜邦线连接单片机开发板供电,一端VCC一端GND
检查TCRT5000输出电压:在分别用黑白纸以2.5mm距离遮住探头时分别用电压表检测INB+与GND间电压(检测位置参考管脚图),检测是否正确,记下高电位与低电位。
调试INA+电压:旋转滑阻同时测量INA+与GND间电压,使其位于之前记下的高低电位之间。
下面是编程思路
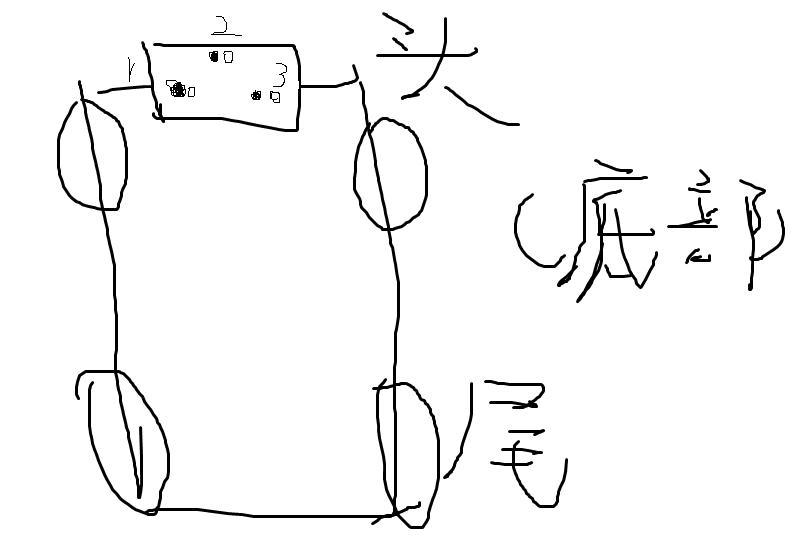
前、左、右,各一个。寻迹时有共有八种情况:
偏左、偏右时123号分别对应:110、011
即将偏左、偏右:001、100
沿线时:101
脱离:111
到终点:010(T形黑线)
十字路口:000
到现在已经把寻迹和避崖的单独运行做好了,车灯和LCD也做好了。
我们打算先使各个功能单独运行,再同时开启。如果还有时间就利用测速模块做自动导航。
尽量这个星期把蓝牙、超声波避障和测速做好,然后星期天会接着以前的更新,把详细进程和程序发上来。
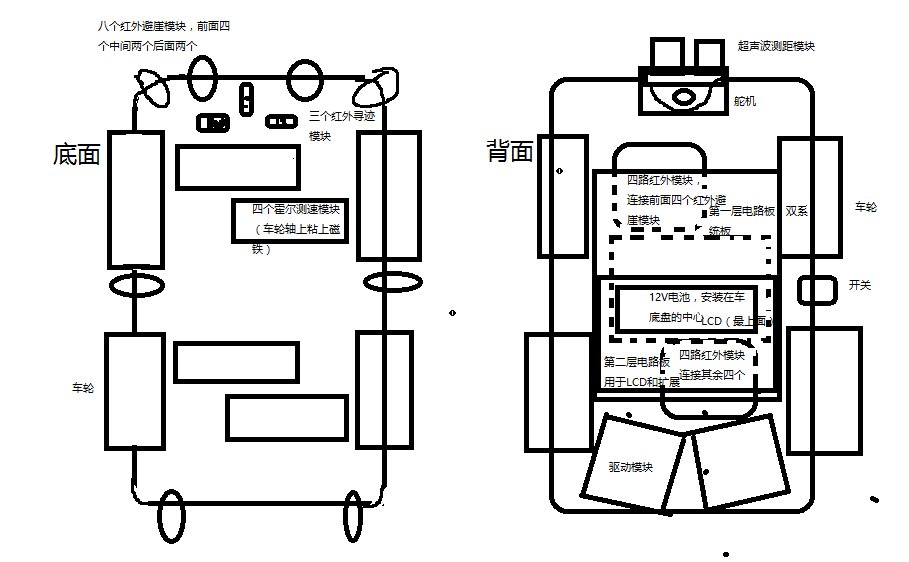
所有的硬件都安装好了,没发现什么问题,我尝试组装了一下,等都弄好后再重新布线,以后大概就是这个样子。



这是双系统板,左上的排针用来分线,左下方是车灯电路(用三极管放大电流),中间下面的排针接12V电池引出的杜邦线、接两个兼具调压的驱动(每个驱动接如12V电源,同时可对外5V供电。)。因为有两个驱动,为了耗电平衡所以把两个5V并联在一起,同时为了防止互相倒灌电流所以在5V端各串联了一个二极管。


如今已经是2017年了,手机里只幸存了一部当时的寻迹的小视频
http://v.youku.com/v_show/id_XMjY1Nzc2NzQwOA==.html?spm=a2hzp.8244740.userfeed.5!2~5~5~5!3~5~A
16级的学弟学妹们加油!
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32K3XX】FlexCAN 模块配置使用被打赏¥30元 | |
| 【S32K3XX】FlexCAN RAM 资源分配整理被打赏¥25元 | |
| 【S32K3XX】IPCF 适配核间中断处理被打赏¥21元 | |
| 【S32K3XX】IPCF 核间通讯模块UNMANAGED方式使用被打赏¥29元 | |
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

