
用Arduino控制电机相对容易。除了简单地旋转电机外,如果电机带有旋转编码器,您还可以控制电机轴的位置。
法拉第定律指出:
线圈的磁环境的任何变化都将导致线圈中“感应”电压(emf)。
这解释了发电机如何产生电压。这是电能转换的机械能。电动机与发电机相反; 它们将电能转换为机械能。在电动机中,电流被馈送到电枢绕组中,该电枢绕组产生磁场,该磁场与由定子中的永磁体产生的磁场相互作用。两个磁场之间的相互作用导致电枢旋转。
有许多不同类型的电机,包括:
直流(DC)电机(我将在本教程中使用的电机)。
交流(AC)电机。
无刷直流(BLDC)电机。
无刷AC(BLAC)电机。
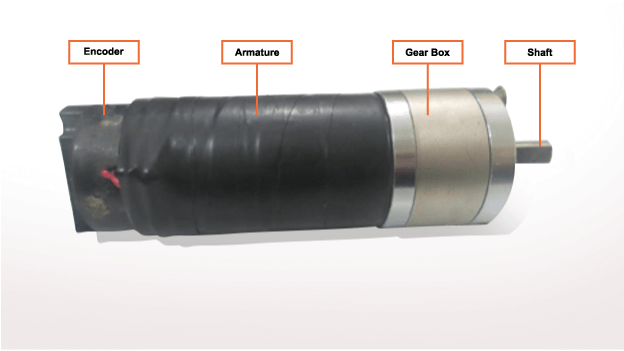
旋转编码器是将轴或轴的角位置或运动转换为模拟或数字代码的装置。旋转编码器有两种类型:
增量编码器。增量式旋转编码器仅在电机旋转时输出脉冲。要使用增量编码器确定轴位置,您必须知道起始位置并使用外部电路来计算输出脉冲数。
绝对编码器。绝对旋转编码器输出对应于旋转角度的数字代码。无需计算脉冲来了解电机轴的位置。您只需要读取编码器的数字输出。
在这个项目中,我们使用的是增量式旋转编码器。下图显示了典型的旋转编码器。

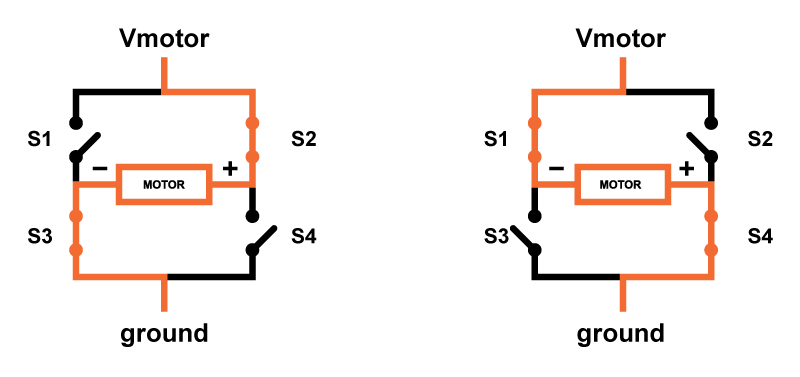
H桥是一种电子电路,可以使微控制器(如Arduino)控制电机的运动。微控制器不能直接连接到直流电机,因为微控制器无法提供电机所需的高电流。H桥包含电机控制所需的高电流开关。这些开关由来自Arduino的信号控制。
H桥允许电动机向前或向后移动。方向由来自Arduino的控制信号序列决定。
通过设置控制信号的占空比来确定电动机速度。这种类型的速度控制称为脉冲宽度调制。占空比为100%时,电机将全速运行。但是,当占空比为0%时,电机将停止并且不再移动。
在本教程中,我们设计并构建了一个使用以下组件的H桥:
TIP 142和TIP 147晶体管
二极管
绿色连接器
光电耦合器
显示了H桥的简化图:
 本教程使用制作的H桥模块。您可以在网络上找到很多H桥电路的原理图,但如果您不想自己构建,可以使用L298 IC。
本教程使用制作的H桥模块。您可以在网络上找到很多H桥电路的原理图,但如果您不想自己构建,可以使用L298 IC。
以下设备用于该实验
Lipo电池11.1V
Arduino ATmega 2560
H桥(自制或IC L298)
电机带编码器
跳线(根据需要)
绿色连接器(又名L型连接器)
6针连接器(专用于电机)
轮子(可选用于电机轴的可见运动)
1.收集所需的所有部件:

 发动机
发动机
 显示马达编码器别针的特写镜头图片
显示马达编码器别针的特写镜头图片
 Arduino Mega 2560
Arduino Mega 2560
 6针电机连接器
6针电机连接器
 绿色连接器
绿色连接器
 电池
电池
 H桥
H桥
 跳线
跳线
 用于H桥的3针连接器
用于H桥的3针连接器
 轮子(可选)
轮子(可选)
2.将跳线连接到电池,然后使用电池为H桥供电:


3.将3针连接器连接到H-Bridge模块,然后在此连接后将H-Bridge模块连接到Arduino:
Arduino 13 - > PWM
Arduino 12 - >前锋
Arduino 11 - >反向


5.现在将6针连接器连接到电机并连接,然后将电机连接到H桥模块。

不要忘记将电机电源引脚连接到H-Bridge电源引脚。标有霍尔VCC和霍尔GND的电机编码器引脚应连接到Arduino 5V和GND引脚。最后,将电机编码器输出通道CH.A连接到Arduino引脚编号21.连接如下所示:

仔细研究Arduino引脚连接:

6.现在将Arduino连接到您的计算机或笔记本电脑进行编程:




编码器是可以连接到任何旋转或线性 设备以跟踪设备的运动和方向的设备。在这里,我们使用绝对旋转编码器来控制电机速度和轴位置。
 我是想直接黏贴代码烧录
我是想直接黏贴代码烧录 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

