
0.前言
MCU实现低功耗本质而言便是停止MCU工作,通过中断的方式重新唤醒MCU,这些中断可以包括外部IO中断,UART接收中断,定时器中断等等。如果结合嵌入式操作系统,可以在空任务或者空任务钩子函数中进入低功耗模式,在系统滴答时钟中断服务函数中重新回到正常工作模式。利用操作系统进入和退出低功耗模式,需要熟悉嵌入式操作系统的空任务和系统滴答时钟中断,下面结合MSP430F5438和FreeRTOS总结一下如何使用嵌入式操作系统实现低功耗工作。
1.进入低功耗模式
多数嵌入式操作系统都包含一个空任务,空任务优先级最低且一直保持就绪状态,空任务可以用于统计CPU使用率,或者让MCU进入低功耗状态。如果不想修改空任务,还可以通过空任务的钩子函数插入实现低功耗的代码。在FreeRTOS中,若需要打开空任务钩子函数,需要在FreeRTOSConfig.h中定义configUSE_IDLE_HOOK。
#define configUSE_IDLE_HOOK1
钩子函数中实现低功耗的代码如下
voidvApplicationIdleHook(void)
{
/*CalledoneachiteraTIonoftheidletask.Inthiscasetheidletask
justentersalowpowermode.*/
__bis_SR_register(LPM3_bits+GIE);
}
在这里可打开全局中断,若全局中断关闭那么系统可能再也“活”不过来了。
2.退出低功耗模式
在大多数嵌入式操作系统中可以在系统滴答中断函数中退出低功耗模式。由于MSP430的退出低功耗的指令只能在中断中使用,所以一旦进入系统滴答中断函数,可先退出低功耗模式。具体的代码实现如下:
#pragmavector=configTICK_VECTOR
__interrupt__rawvoidvTIckISREntry(void)
{
externvoidvPortTIckISR(void);
__bic_SR_register_on_exit(SCG1+SCG0+OSCOFF+CPUOFF);
vPortTickISR();
}
该段代码位于port.c中,在MSP430F5438分支中,系统滴答定时器采用TIMER0_A0所以configTICK_VECTOR被定义为
#define configTICK_VECTORTIMER0_A0_VECTOR
其他相关的定义可以查看FreeRTOSConfig.h文件
3.实现过程
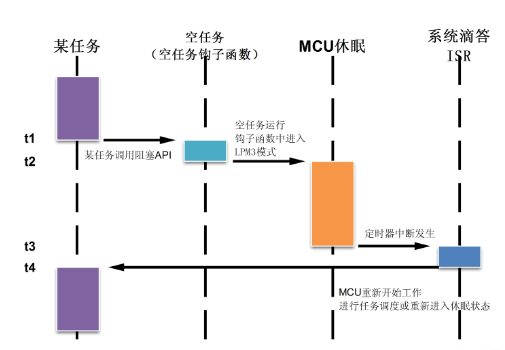
例如某任务在t1时刻调用阻塞API,例如vTaskDelay,此时任务交出CPU使用权由OS进行任务调度。t2时刻,由于没有其他就绪任务,OS运行空任务,在空任务的最后进入空任务钩子函数,在空任务钩子函数中MCU进入低功耗模式,此时可进入LPM3模式。t3时刻MCU进入低功耗模式之后,MCU停止工作。t4时刻,由于系统滴答时钟中断服务函数中,MCU重新处于活跃状态,并且通过指令退出低功耗模式,此时OS任务调度器再次工作,若此时任务再次处于就绪状态便重新运行该任务。
以上便是如何利用OS实现低功耗的基本方法,但是t3时刻和t4时刻是有反复的。例如,系统滴答时钟ISR发生之后,OS任务调度器中并没有就绪的任务,只能再次运行空任务,通过空任务再次进入低功耗模式,如此反复直到某任务就绪便执行任务代码。
通过以上的分析,使用嵌入式操作系统和实现MCU低功耗并不矛盾,反而带来了诸多方便。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

