
从传统的工业机器人系统到当今最新的协作机器人,各类机器人都依赖于能够生成和处理大量高度变化数据的传感器。这些数据可用于启用能够做出实时决策的自主机器人,从而实现更智能的事件管理,同时在动态的真实环境中保持生产力,如图1所示。
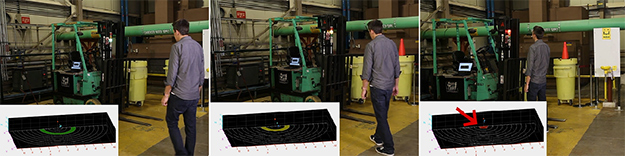
图1:毫米波(mmWave)传感有助于监控机器周围区域,实现实时事件管理 TI毫米波传感器如何在工厂实现高级智能化 德州仪器(TI)的毫米波(mmWave)传感器能够利用集成处理器处理片上数据,以实现实时决策。与某些基于光或视觉的传感器相比,这种集成实现了更小型设计。此外,仅使用单个传感器检测多个对象和处理数据的能力可降低整体系统成本。 对工厂环境中的另一个重要考虑因素是对灰尘、烟雾和可变照明等环境条件的免疫。毫米波传感器可在任何这些条件下运行 - 并安装在外壳塑料后面 - 无需外部透镜、孔径或传感器表面。所有这些属性使毫米波传感器在工业传感应用中表现良好。 智能化边缘处理允许工厂机器和机器人与人交互,并减少事故发生。例如,可配置TI毫米波传感器来监控机器周围的特定相关区域,定义禁区,并向区域内的人员发出警告。可对这些区域进行分区,使得传感器可基于区域占用情况或人员接近度而相应地做出相应反应。图2演示了此功能,其中绿色区域表示安全;黄色区域表示警告,而红色区域表示危险,表明接近机器。
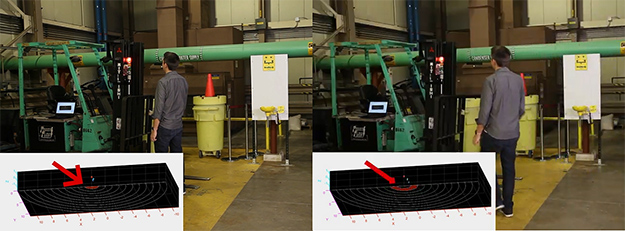
图2:人员缓慢走过一台机器,危险信号在1米处闪烁 TI毫米波传感器不仅可精确测量视野中物体的距离,还可测量任何障碍物的相对速度。这使得机器人能够根据物体接近传感器的速度采取更多预测动作,如停止机器。图3所示为机器根据接近机器的人员的速度触发危险区域警告的速度。
图3:当一个人慢走时,危险标志在1米处触发(a);当一个人快走时,危险标志在2米处触发(b) 为提高生产率,您希望机器避免因错误触发而停止。图4中的示例所示为集成跟踪算法如何使传感器准确地确定人员方向。当有人离开机器时,它不会打开警告信号,也不会采取其他行动。
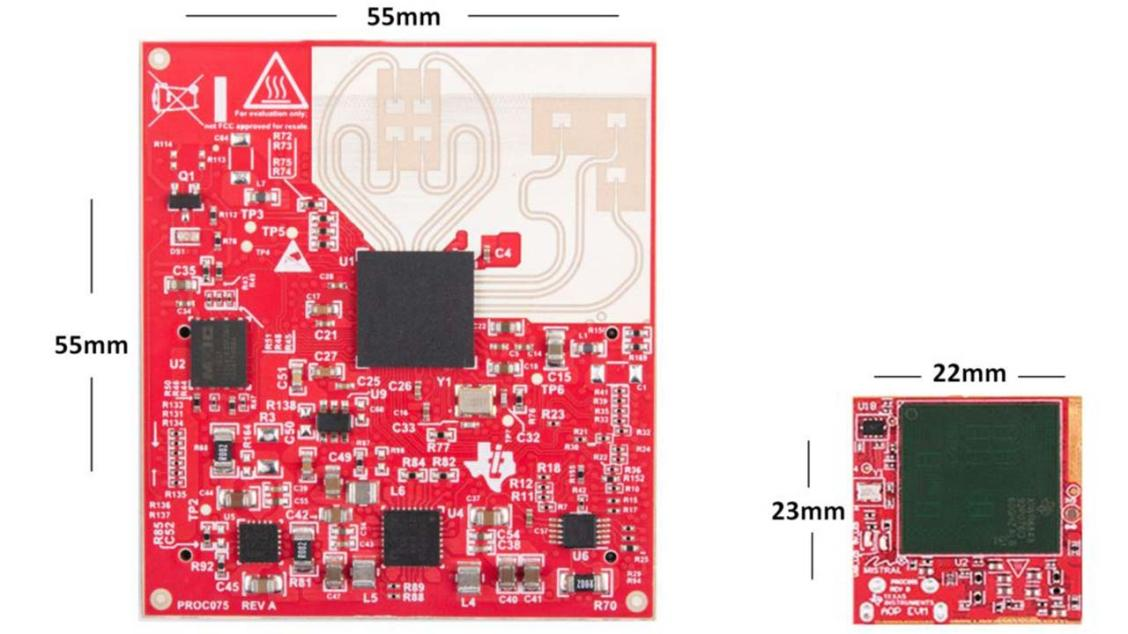
图4:传感器不指示危险信号,因为有人正在离开机器 简化机器人设计并加快开发速度 为了简化机器人系统的设计并缩短开发时间,请访问我们的区域扫描仪 例程 。它的特点是新增了静态对象检测算法,能够检测到可能留在机器人“禁区”内的静态对象,例如盒子、手推车或其他设备,同时忽略永久静态对象,例如可能已成为场景一部分的柱子。该 例程在TI毫米波IWR6843ISK 、IWR6843ISK-ODS和IWR6843AoP评估模块(EVM)上运行。 使用我们的 片上天线(AOP)传感器,其特征是将射频(RF)天线蚀刻到芯片的封装上,与其他雷达技术相比,可节省75%的电路板面积,从而帮助您设计出体积更小的系统,如图5所示。 图5:使用TI毫米波封装天线传感器,将传感器体积缩小高达75% |
共2条
1/1 1 跳转至页
[分享]边缘智能化为自主工厂提供动力

关键词: 智能 工厂 机器 传感器
共2条
1/1 1 跳转至页
回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

