
不知道您是否曾经被波士顿动力的机器狗视频刷过屏,是否曾经梦想自己也能亲手玩弄一下最前卫、科技感十足的12自由度机器狗?现在机会终于来了!

斯坦福Pupper是一个小型化的四足机器人,能跑能跳能遛弯。亲民的价格和简单的设计可以让高中及以上机器人爱好者自己动手DIY一个有趣能动的四足机器人。
可以用游戏手柄控制Pupper的移动方式和目的地。Pupper内部的树莓派会接收到控制器的命令后,控制伺服电机的运动(每条腿三个),从而以正确的运动方式走到正确的位置。
Pupper被设计为“黑客入侵”模式,希望用户能够根据自己的内心需求调整和扩展机器人的行为。尽管机器人可以开箱即用,但您可以添加的一些功能包括不同的步态(约束,奔跑等),如叼东西或跟着你走等高级行为。您还可以在操作真实Pupper之前,在PyBullet中模拟Pupper的运动。
概要
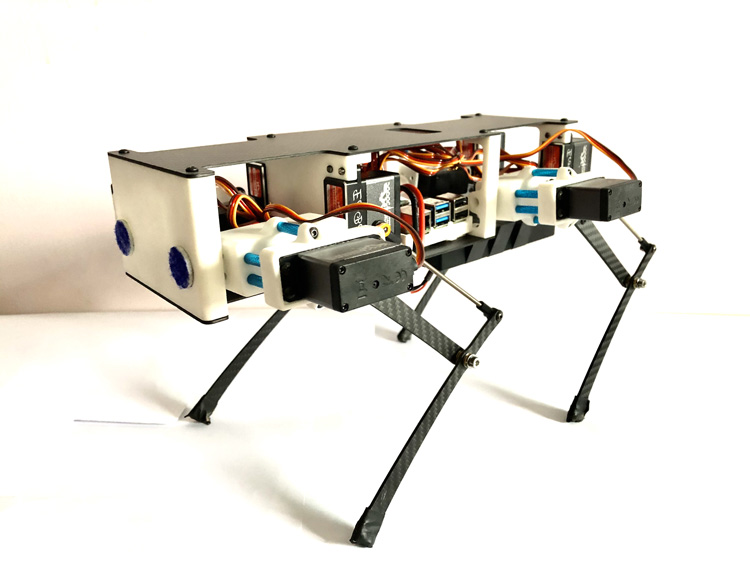
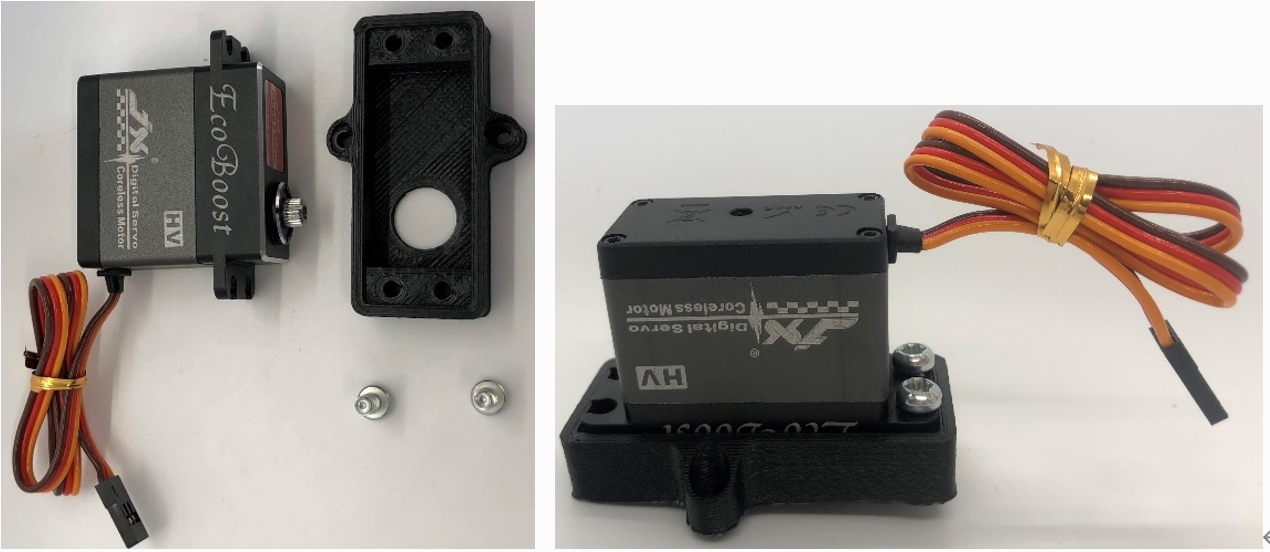
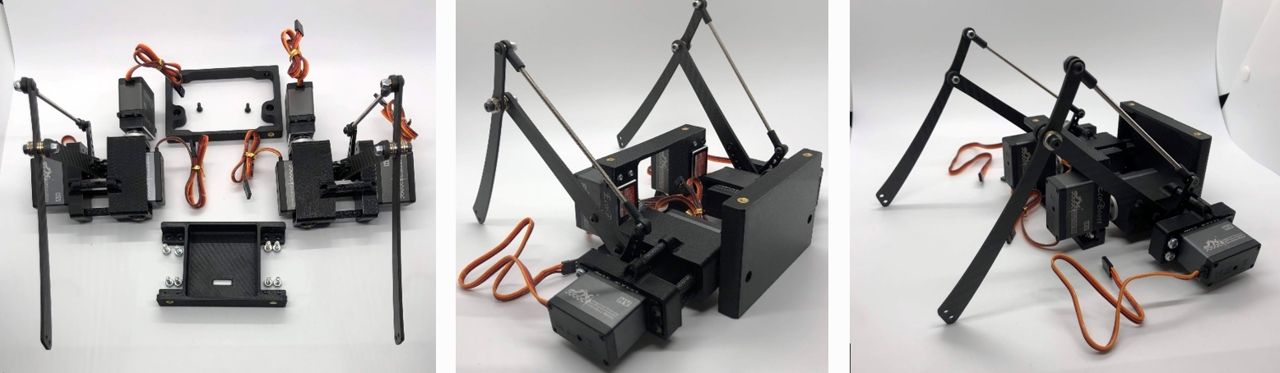
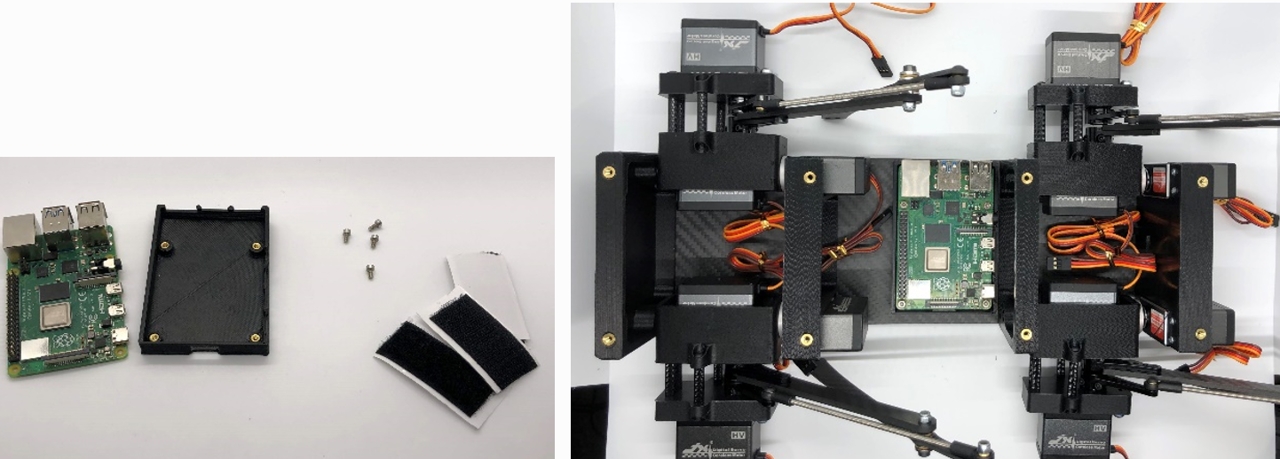
为了让组装简单有趣,需要烙铁焊接的物料,我已经提前做了焊接,组装过程中不需要用到烙铁。下图所示为组装好的Pupper和未组装的所有物料示意图。

关于成本,如果从美国购买组装物料,成本低于$1000的可能性很小(还不包括损耗),最让人心急的是快递时间,赶上疫情,快递的时间鬼神莫测。好在笔者已经在国内打通了供应链,所有物料都可以快速搞定,详细见后面的连接。
建议先从笔者提供的连接购买组装好的Pupper,上手快,也方便练习拆解与组装;
第一次DIY不建议使用胶水,熟练后再上胶水,否则后悔莫及;
如果已经下定决心自己组装了,请参考如下的组装说明,祝君好运!
开启组装之旅
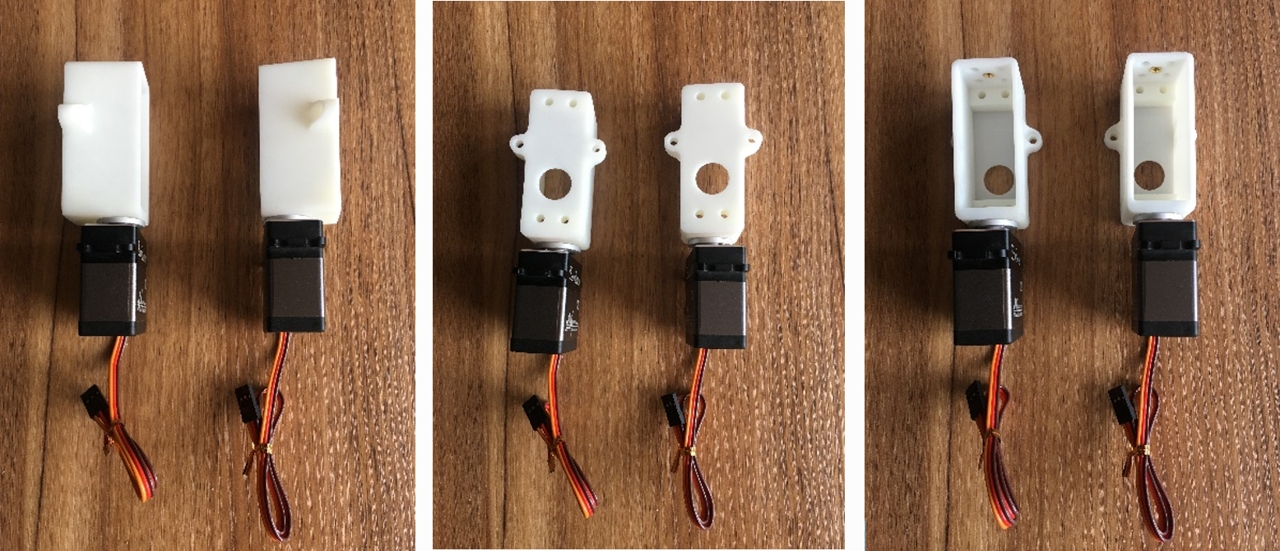
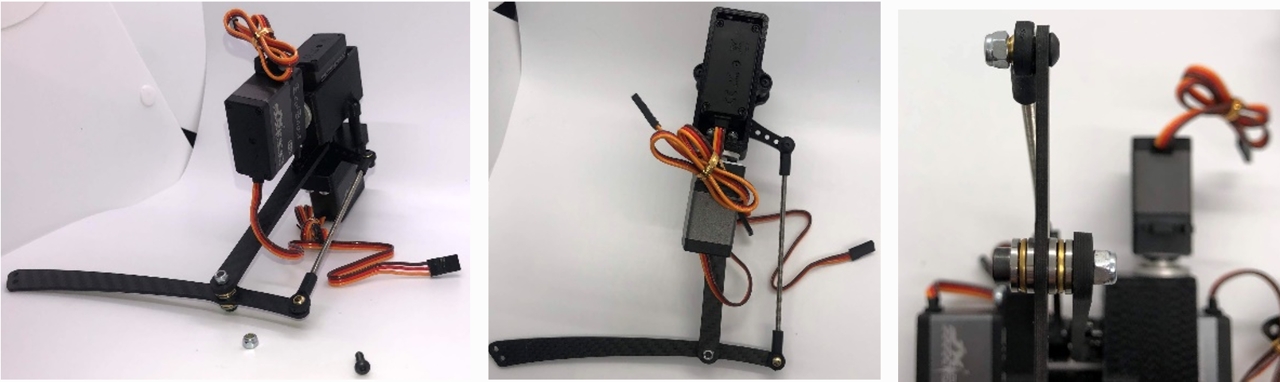
步骤1. 安装伺服码盘
1.1. 使用伺服臂(不是码盘)扣在伺服上使伺服处在中间位置
1.2. 安装伺服码盘,让码盘的孔位大概在45度位置(见下图)
1.3. 逐步把M3x6mm螺钉拧紧,让码盘和伺服融合在一起
1.4. 一些码盘的质量较差,拧螺钉时比较费劲。注意来回微调码盘和伺服轴的位置,找到适配角度就会比较容易。拧螺钉的过程中,注意观察不要过度拧紧,否则会损坏伺服。

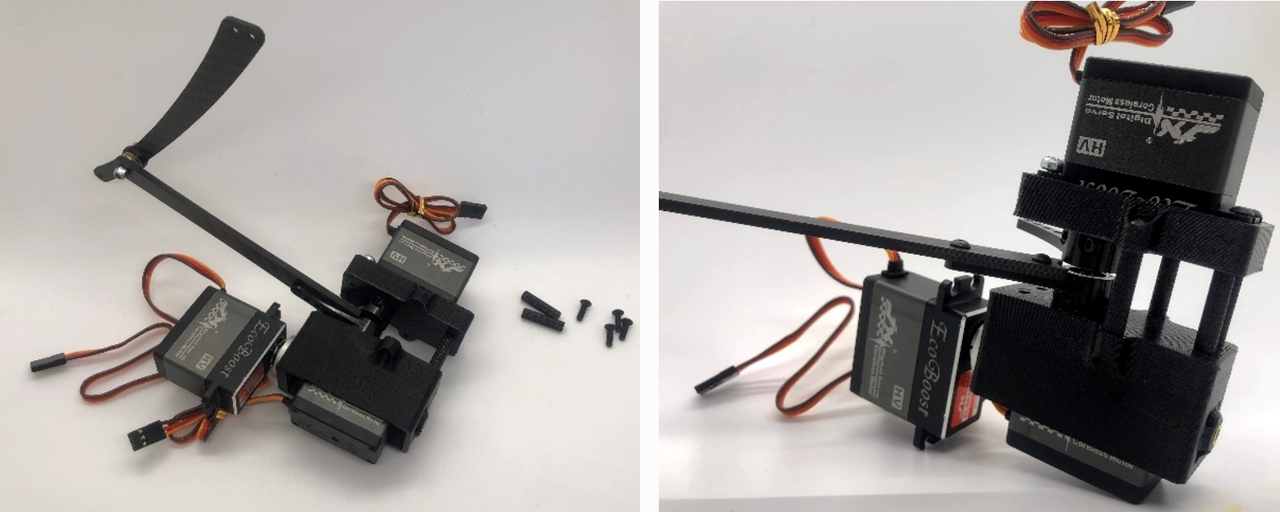
步骤 2. 连接码盘和大腿根伺服内框
按照90°角度连接,并拧紧M3x8螺钉(如图所示 ),组装前,过程中及后的示意图(注意左右腿的方向)

步骤3. 安装大腿根内框伺服
3.1. 将伺服电机放入内框,然后轻轻摆动,使伺服轴从内框的大圆孔中伸出
3.2. 伺服左侧使用M4x10mm 螺钉,伺服右侧使用M3x16mm 螺钉
3.3. 把M3x16mm螺钉拧入连接柱
组装示意图(注意螺钉的位置)

步骤 4. 安装大腿根内侧伺服臂
4.1. 将伺服转到中立位置,然后以所示角度(向下45度)滑动伺服臂
4.2. 在伺服臂上侧拧入M3x8mm 螺钉,在边上拧入M2x8mm 螺钉,固定伺服臂
组装示意图

步骤 5. 腿部
按照如下示意图把物料摆放好后安装,顺序分别是,带肩螺栓,分体式轴承,下部小腿,分体式轴承,上部大腿,锁紧螺母。

步骤 6. 连接大腿和伺服臂
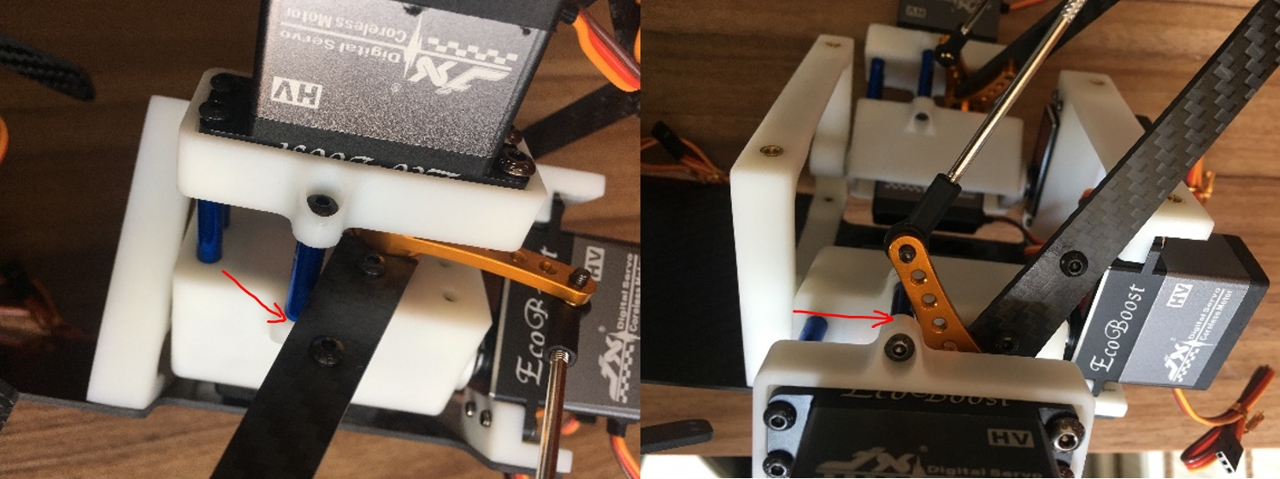
6.1. 将上肢大腿的弯曲边缘与伺服臂对准。通过碳纤维上预留的孔拧入M3x6螺钉。
6.2. 特别要检查距离伺服最近的螺钉要垂直拧入,防止和外部伺服臂刮蹭,发生刮蹭的另一个重要原因是支柱拧的太紧,3D打印件硬度有限,不能过度拧紧。
步骤7. 大腿根外部
将伺服放入3D打印的框中,并用两个M4x10mm螺钉加固定,组装示意图如下。
步骤8. 大腿外侧伺服安装
8.1. 将伺服臂调整到其中间位置,然后如图所示以45度角固定伺服臂。
8.2. 伺服臂的固定参考之前步骤.
组装示意图

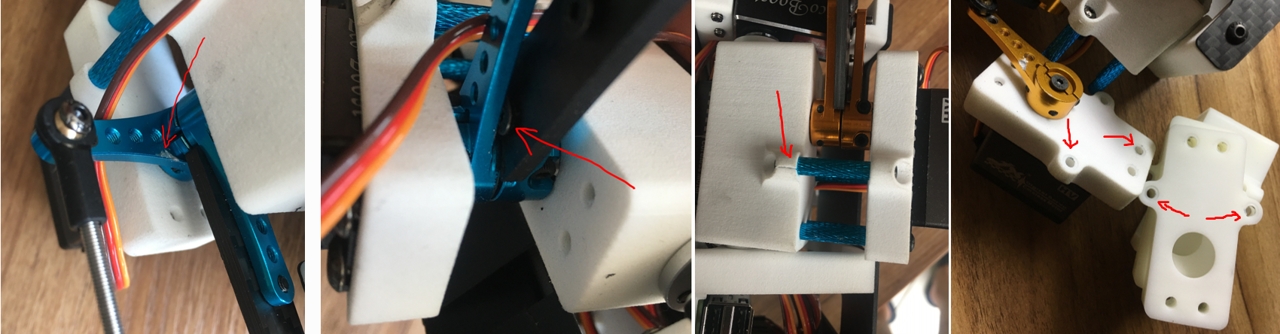
步骤9. 连接大腿根内外部
9.1. 对齐内外部组件,M4x10mm螺钉应在同一侧,伺服臂应成90度角。
9.2. M3x16 螺钉拧入支柱内,不要用力过猛,防止损坏。
9.3. 此时,上下腿可能会开始移动,可以标记左右两侧,以免感到困惑。
示意图

步骤10. 加入另外2个支柱
用4个M3x10mm螺钉分别固定另外2个支柱,示意图如下。
步骤11. 测试每个伺服器的整个运动范围
11.1. 离身体近的伺服臂应从45度向上移动到完全接触支柱
11.2. 离身体远的伺服臂应从向上接触支柱到向下倾斜45度
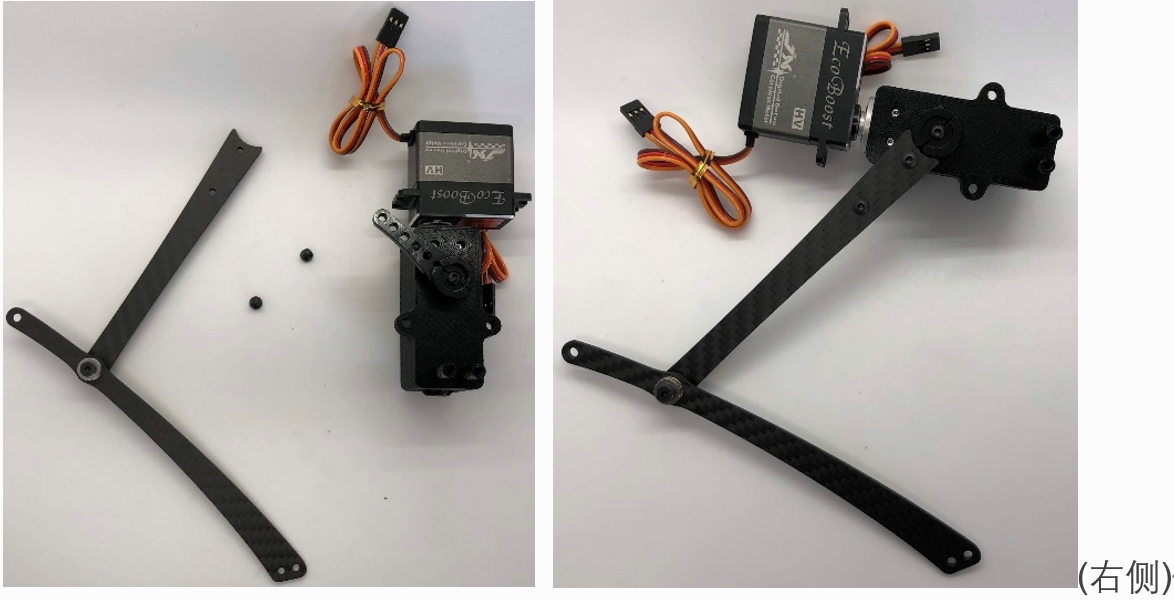
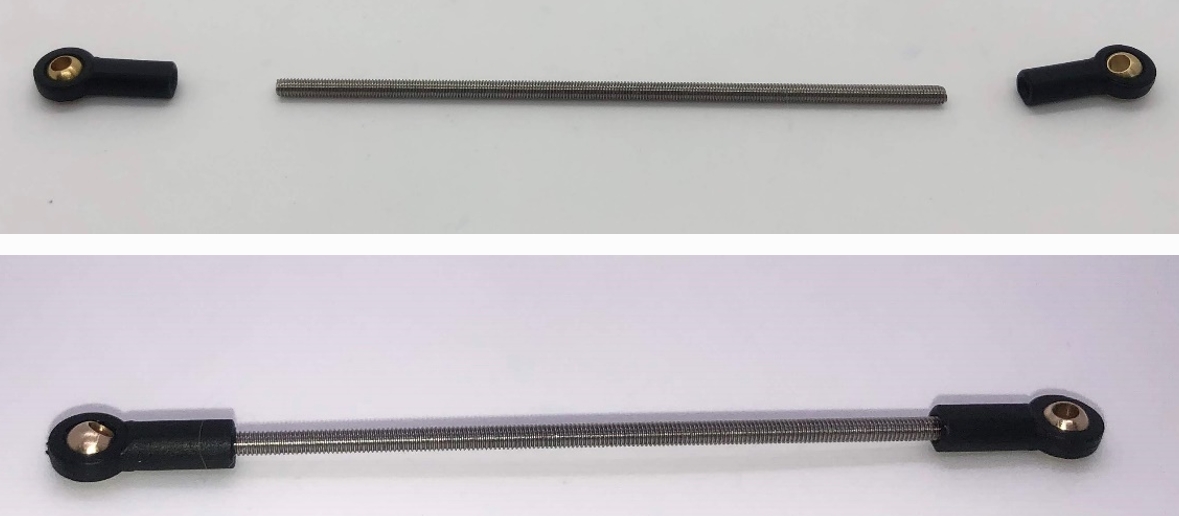
步骤12. 组装大腿延长杆
均等地拧紧杆端,直到杆上最远的孔间距与上腿连杆上的孔(伺服臂中心到最后一个碳钻孔点)相匹配为止 ,请参阅图片。
步骤13. 将延长杆连接到伺服臂
从内侧(注意分清左右腿的内侧),用M3x10螺钉将延长杆固定到伺服臂上。

步骤14. 将延长杆连接到小腿
将M3x10螺钉穿过碳纤维件,然后穿过杆端,使用内六角扳手拧紧时,使用扳手将M3防松螺母固定到位。
关键的骨架已经完成,后续身体部分的组装就是“面子”工程了,颜值当道的时代,面子工程不容小觑!

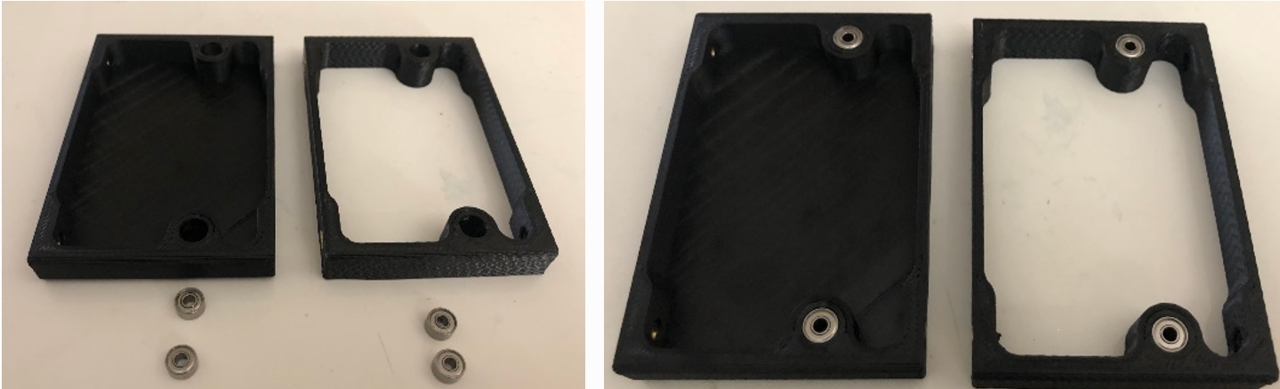
步骤15. 将轴承压入指定空位
将两个轴承压入最前面3D打印支架的两个孔中(称为“前前部”),将另外两个轴承压入后面一块的两个孔中(称为“后前部”)。
步骤16. 固定大腿部
16.1. 用M4x8螺钉把腿部件固定在身体支架上
16.2. 用M3x8 螺钉穿过轴承拧入腿部的支架螺钉孔中
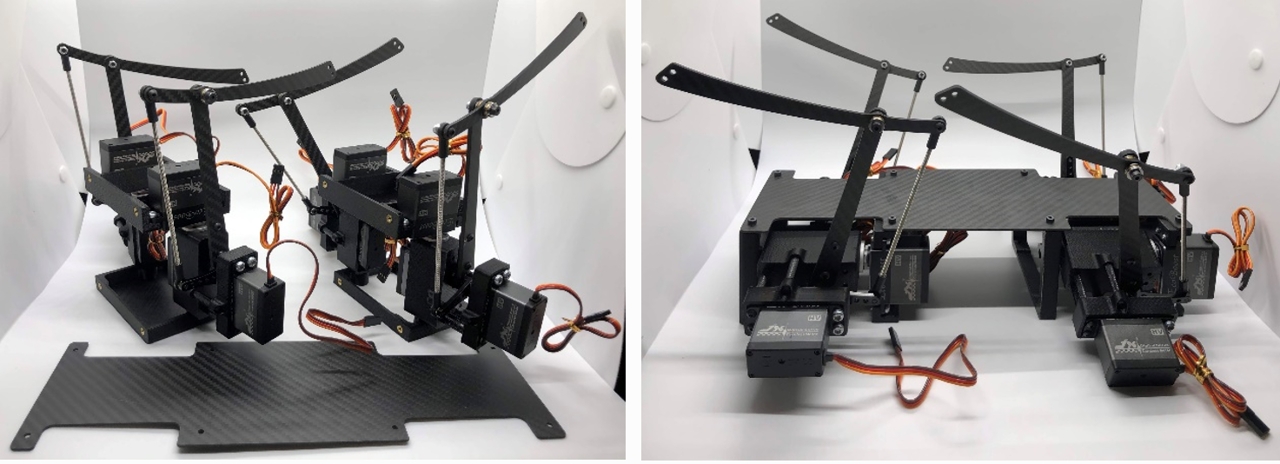
步骤17. 把组装好的腿/身体支架固定到身体底部碳纤维板上
用16个 M3x6 螺钉把之前组装好的部件固定在底部碳纤维底板上。
步骤18. 组装树莓派板子
18.1. 参考上面类似的步骤把树莓派固定到3D打印件上。
18.2. 用固定绑带把树莓派固定到底部碳纤维板上。
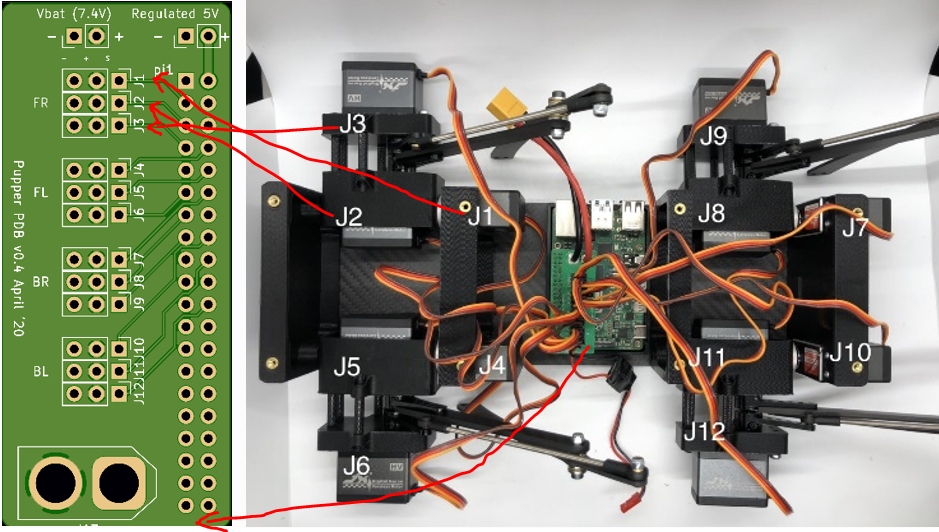
步骤19. 组装电源板,连接伺服到电源板
19.1. 把电源板插入树莓派板子上(注意插针方向,伺服的J1J2…J12和电源板上的J1J2…J12一一对应)
19.2. 按照示意图把伺服带的杜邦线分别插入电源板的对应位置,注意线序
19.3. 把变压器连接电源板
示意图

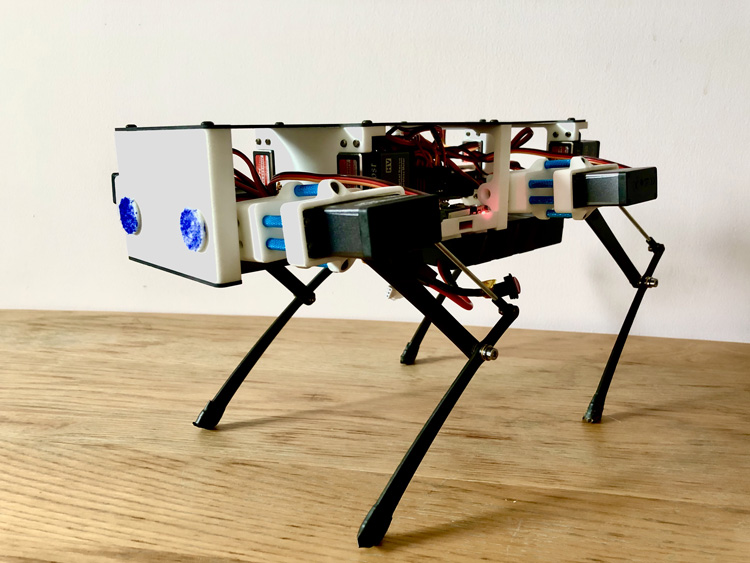
大功告成
尽情 play 吧!
via https://shumeipai.nxez.com/2020/06/11/stanford-pupper-assembly-tutorial.html
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

