
比例加积分加微分规律(或称PID控制规律)是一种由比例、积分、微分基本控制规律组合的复合控制规律。这种组合具有三个单独的控制规律各自的优点。具有比例加积分加微分控制规律的控制器称比例积分微分控制器,如图1所示。
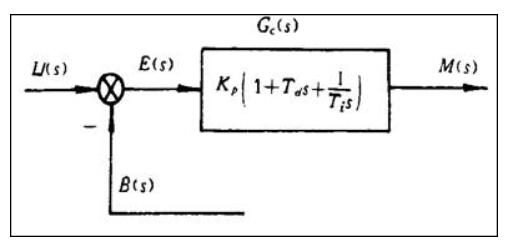
图1 PID控制器
PID控制器的传递函数
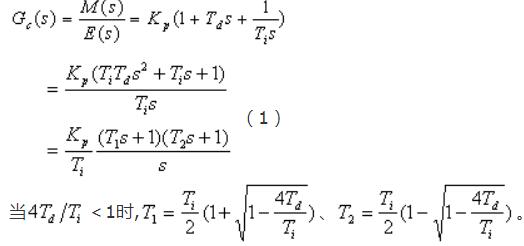
从式(1)看出,控制系统串入比例加积分加微分控制器后,由于引入了一个位于坐标原点的极点,可使系统无差度增加,同时,由于引入了两个负实数零点,与PI控制器相比较,除保持了提高系统稳定性能的优点外,在提高系统动态性能方面具有更大的优越性,因此,这种控制器在控制系统中得到广泛应用。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

