
众所周知,开关电源的控制方式主要包括了传统的电压模式、峰值电流模式、平均电流模式。这些主要流行的控制模式统统归属于 PWM 控制模式。而 PFM 模式基本出现在下列的情况中:
电压滞环控制芯片,如 TI-TPS5211, TI-LM3485,ON-CS51031, MP-2905。
电流滞环控制芯片,如 Microchip-HV9930,TI-LM27212。
在一些电源控制芯片中,轻载工况下,还会切换至 burstmode 以及 pulse skipping mode,这两种模式也归属于 PFM 控制模式,用于提高轻载工况下的效率。也有其他学者指出 Pulse Skipping mode,另归一类。
谐振控制器基本都是 PFM 控制模式。在之前的推文中,帅锅也介绍过基于 bang-bang control 的 LLC 控制芯片,bang-bang 也即是 PFM 控制模式的一种。(VMC 和 CMC 的 LLC 控制器仿真对比 第四节 (TI UCC25640x 混合滞回控制))
今天要介绍的 COT 控制模式,即是 Constant-on-TIme mode,恒定导通时间控制,它由滞环控制模式发展而来。顾名思义,其在整个控制过程中会保持开通时间 Ton 恒定不变。当然,相应也有 constant-off-time mode,不做过多介绍。
滞环控制
滞环控制如下图,分压电阻得到的反馈电压 vfb 和参考电压 vref 通过一个滞环比较器比较,我们假设滞环比较器的环宽为 h, 一般来说,滞环带宽一般在 15mV~20mV 之间。当 Vfb 低于 vref-(1/2)h 时,比较器输出为高,HS 打开,电感电流线性上升,由 ESR 带来的输出电压纹波此时也会线性上升,vfb 亦复如是。当 vfb 高于 vref+(1/2)h 时,比较器输出为低,LS 打开,电感电流下降,输出电压和 vfb 纹波下降。
迟滞控制的优势在于其环路极其简单,无需误差放大器,也不需要考虑复杂的补偿问题,因此可以达到非常大的带宽,瞬态响应速度极快。
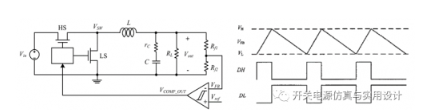
图 1 滞环控制模式
当 Buck 工作在 CCM 模式下,其输出电压纹波可以计算为
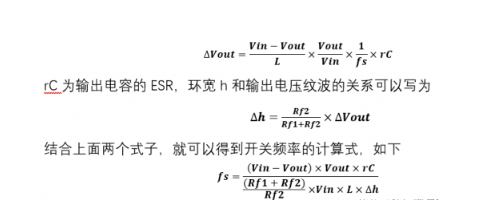
可以看出,开关频率和选择的电感、滞环环宽以及电容 ESR 都有关系。Vin 变化时,以及 ESR 会受到温度的影响而变化,比较器的传播延迟等,都会影响到开关频率,这会使得 EMI 的处理变得比较困难。

图 2 输出纹波电压细节
而实际上,输出电容还有 ESL 存在,ESL 带来的纹波会在输出电压纹波上形成一个小尖锋,有可能在开关状态切换的时候,导致反馈电压 vfb 会超出滞环的上限。再考虑耦合到输出纹波上的噪声,可以想象,控制器会变得非常敏感。另一方面,当输出电压较高时,其输出纹波会增大。因此,其商用的 IC 总体来说并不多。
恒定导通时间(COT)
COT 控制模式基于滞环控制模式发展而来。在基本的迟滞控制中增加一个单稳态计时电路(One Shot)控制功率管的导通时间,使功率管导通一个恒定的时间。
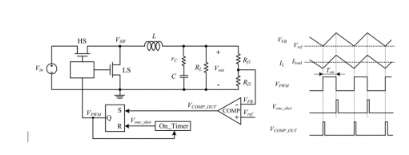
图 3 COT 控制模式
当反馈电压 vfb 低于参考电压 vref 时,比较器的输出 vcomp_out 会拉高,SR latch 被置位,Q 输出也拉高,HS 就被打开,电感电流线性上升,输出电压纹波以及 vfb 上的纹波也会上升,因此,vcomp_out 会立马拉低,形成一个脉冲。而 Q 输出拉高同时,也启动了单稳态计时器,直到这个固定开通时间结束。单稳态定时器输出 vone_shot 翻转拉高,复位 SR latch。当结束 HS 开通过程后,电感电流下降,输出电压纹波也下降,直到 vfb 再一次低于 vref,开启新的周期。
可以看出,COT 是一种纹波电压谷底控制方式。如果系统已经开通了一个 Ton 的时间,发现 vfb 仍然低于 vref,怎么办呢?从逻辑控制图中可以看出,此时 vcomp_out 会一直高电平,当 Ton 结束,Q 拉高之后,S 和 Q 均为高电平,根据 SR latch 的真值表,此时 SR 处在 invalid 状态,是不允许出现的逻辑错误。因此,可以再 Ton 结束后,增加一个最小关断时间 Toff_min,强制关断 HS,然后再进行下一次 Ton 开通。一方面增加 Toff_min 可以保证逻辑正确,另一方面也可以避免 HS 一直导通情况下的电感器的饱和。
COT 的稳定性问题:
从上面的逻辑控制图中可以发现,COT 的稳定性建立在 vfb 纹波上,也即输出电压纹波上。当输出电压纹波足够大时,可以保证足够的稳定性。因此直观地看,COT 是一种基于 power stage 大信号的非线性控制。利用环路分析仪扫描伯德图仅仅适用于电压模式、电流模式之类线性控制系统,此时对 COT 控制已经不再适用。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

