
迅为4412开发板-步进电机-驱动和测试例程
和本文档配套的资料有:
1 内核配置和步进电机驱动补丁包:
topeet_modules_20190319.tar.gz
2 linux-C 的测试例程:
iTOP-4412-linuxc-stepmotor_V1.0.zip
3 QtE 的测试例程:
iTOP-4412-QtE4.7-step_moter_V1.0.tar
4 Android 的测试例程:
iTOP-4412-Android4.0-stepmotortest-V1.0.zip
请注意,在光盘的内核源码中,没有步进电机的驱动,需要添加步进电机的驱动之后才能使用。步进电机使用的是 camera 接口上的 IO,需要屏蔽掉 camera 驱动。
1.硬件连接
硬件连接分为两个部分,供电和控制线的连接。
如下图所示,是步进电机的原理图部分。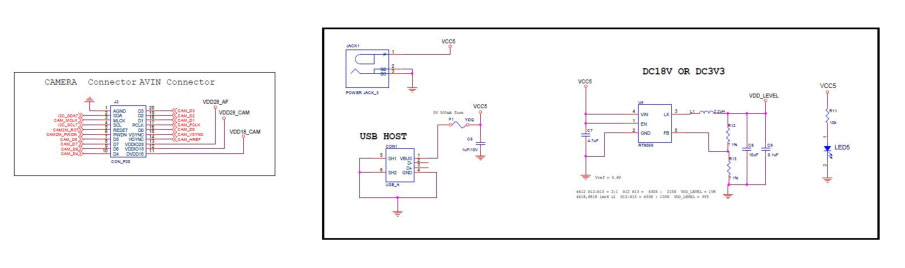
端子 j2 可以看出,需要通过排线和开发板的 camera 接口。上图右半部分,可以看出供电可以采用 5v 电源或者 usb 供电的方式。
排线链接,如下图所示。火牛座和 USB 线供电二选一,如下图所示是 usb 线供电。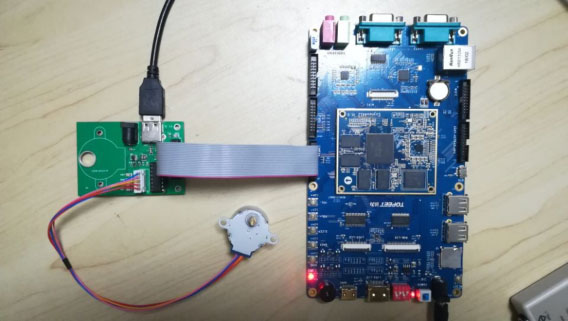
这里务必需要注意的是,如果大家使用的是默认的光盘内核镜像,请不要给步进电机上电太长时间。因为步进电机驱动芯片,默认状态是上拉,会导致步进电机处于不正常的状态,会让电机发热。
需要将步进电机驱动配置完成之后,步进电机驱动在初始化的时,将步进电机的驱动芯片拉低,这样步进电机就会处于准备工作状态,这种状态不会有电流,不会导致步进电机发热!
2.内核配置和补丁包
由硬件部分可知,步进电机使用的是 camera 接口,内核默认状态会编译 camera 驱动,camera 驱动会占用电机用到的四个 GPIO,所以首先需要在内核配置中将 camera 驱动去掉。然后添加驱动补丁包,重新编译内核,烧写到内核中。
2.1 内核配置
进入内核目录,配置所需要的缺省文件,使用命令“make menuconfig”,如下图所示,进入配置界面。
选中“Device Drivers --->”进入。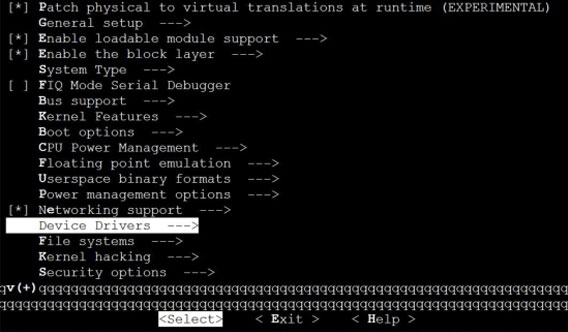
如下图所示,选中“Multimedia support --->”,进到选项中。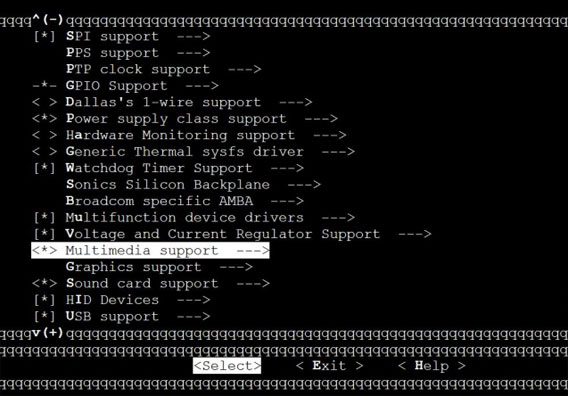
如下图所示,进入“Video capture adapters --->”选项。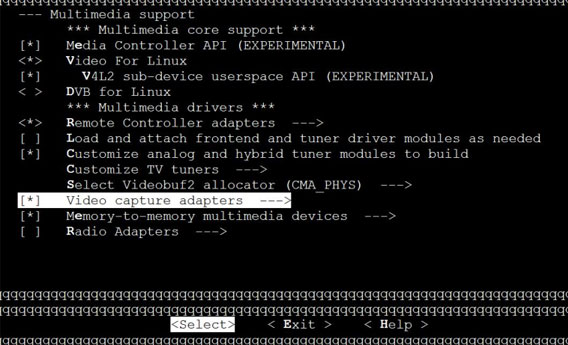
如下图所示,取消“OmniVision OV5640 sensor support ”,这个是摄像头 ov5640的配置选项。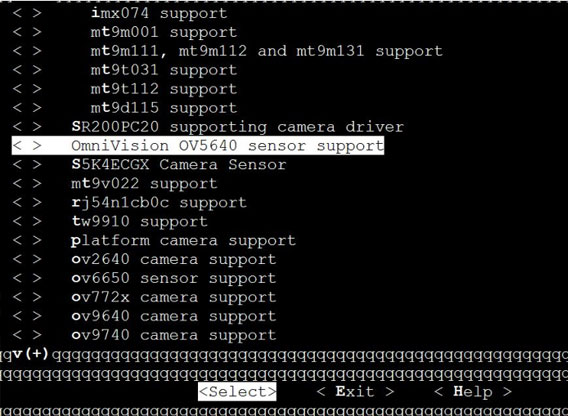
如上图所示,取消 ov5640 的选项,然后保存退出,得到新的.config 文件。
2.2 修改 Makefile 文件
然后需要修改 Makefile 文件。
打开“drivers/char/Makefile”文件,如下图所示。
增加以下代码:
obj-y += topeet_modules/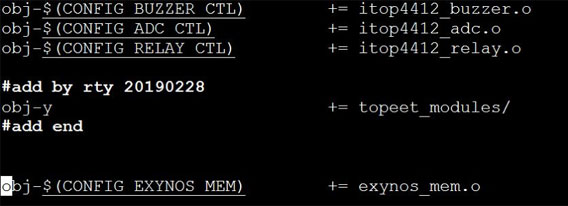
然后保存退出。
2.3 补丁包
驱动补丁包“topeet_modules_20190319.tar.gz”和文档放在一起。
补丁包同时也放在网盘链接“iTOP4412 开发板资料汇总(不含光盘内容)\iTOP-4412开发板系统源码及镜像(其他)\topeet_modules”目录下的“topeet_modules_20190319.tar.gz”下,日期可能会有变化,使用最新日期的压缩包即可。
拷贝到“drivers/char”目录下,使用命令“tar -vxftopeet_modules_20190319.tar.gz”解压,如下图所示。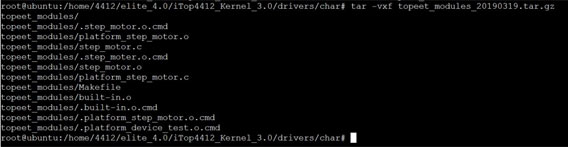
2.4 内核编译和测试
重新编译内核,烧写到开发板,启动开发板,如下图所示。在“/dev”目录下可以看到有设备节点“step_motor_driver”生成。
至此,内核驱动配置完成。这个时候给步进电机上电,会发现四个并排的小灯已经灭了。
3.Linux-C 的测试例程
然后拷贝和本文档一起打包的“iTOP-4412-linuxc-stepmotor_V1.0.zip”压缩包中“step_motor_app”文件到开发板(U 盘,tf 卡或者 nfs 都可以)。
如下图所示,拷贝到开发板上,作者的系统是最小 Linux 系统。如果是 Android 系统,则需要使用“chmod 777 /dev/step_motor_driver”修改权限。
使用命令“./step_motor_app”如下图所示,可以看到有如下提示。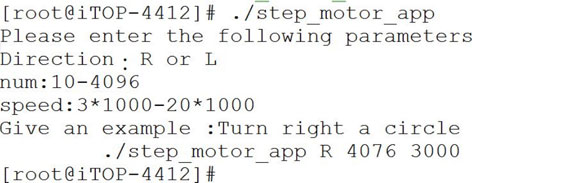
步进电机的测试例程需要传递参数。
第一个参数是 R 或者 L,用于设置步进电机的方向;
第二个参数是步角距,步角距是 5.625/64 度,4096 个步角距就是 360 度,所以这个参数的范围是 0-4096,取值 4096 是一圈,最小建议为 10。
第三个参数是转速,建议取值为 3000 到 20000 之间,小于 3000 转速不稳定。提供了一个 demon 为“./step_motor_app R 4076 3000”。
使用命令“./step_motor_app R 4076 3000”,可以看到步进电机在右转,转一圈之后就会停下,“./step_motor_app L 4076 3000”会左转一圈之后停止,用户可以执行测试其它参数。
4.QtE4.7 的测试例程
和本文档一起打包的“iTOP-4412-QtE4.7-step_moter_V1.0”为 QtE4.7 的测试源码资源包,源码中的“step_moter”为步进电机的编译好的 qt4.7 程序。
请注意,需要参考本文档第二小节,先配置内核驱动,确认有设备节点“/dev/step_motor_driver”。
开发板烧写 QtE4.7 系统,将“step_moter”拷贝到开发板,使用命令“./step_moter& ”运行,如下图所示。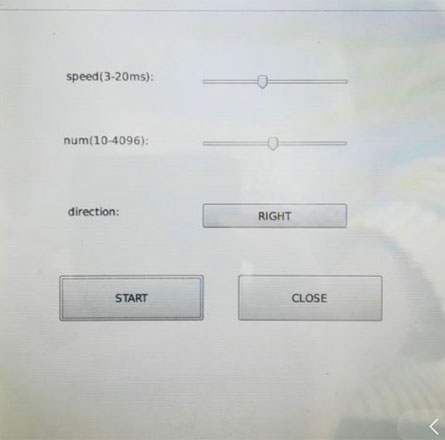
以上界面中,参数如下:
Speed:通过改变延时来控制速度,延时越短,转速越快。延时范围:3--20ms。
Num:设置步进数,当值为 4096 时转一圈。
Direction:设置转动方向。RIGHT 为正转,LEFT 为反转。
START:设置好后,点击 START 开始运行。
CLOSE:关闭当前页面。
5.Android4.0.3 的例程测试
“iTOP-4412-Android4.0-stepmotortest-V1.0.zip”为 Android4.0.3 的测试源码资源包,源码包中的“bin”下的“stepmotortest.apk”为步进电机的编译好的 Android4.0.3 程序。
请注意,需要参考本文档第二小节,先配置内核驱动,确认有设备节点“/dev/step_motor_driver”,如下图所示。
在控制台输入命令“chmod 777 /dev/step_motor_driver”修改权限。
在控制台输入命令“chmod 777 /dev/step_motor_driver”修改权限。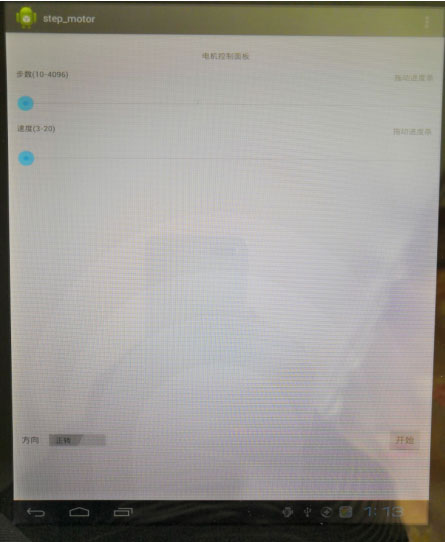
速度:通过改变延时来控制速度,速度设置越大,转速越快,但不能设置成 20。
步数:设置步进数,当值为 4096 时转一圈。
方向:设置转动方向。
START:设置好后,点击 START 开始运行。
共6条
1/1 1 跳转至页
迅为4412开发板-步进电机-驱动和测试例程
共6条
1/1 1 跳转至页
回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32DS】S32K3 RTD7.0.1 HSE 组件配置报错问题解决被打赏¥27元 | |
| 【S32K3XX】MCME 启动 CORE1被打赏¥23元 | |
| AG32VH407下温度大气压传感器及其检测被打赏¥20元 | |
| AG32VH407下光照强度传感器BH1750及其检测被打赏¥22元 | |
| AT32VH407下使用温湿度传感器DHT22进行检测被打赏¥20元 | |
| DIY一个婴儿澡盆温度计被打赏¥34元 | |
| 【FreeRtos】FreeRtos+MPU region 配置规则被打赏¥23元 | |
| 【分享开发笔记,赚取电动螺丝刀】三分钟快速上手驱动墨水屏(ArduinoIDE)被打赏¥28元 | |
| 【S32K3XX】LIN 通讯模块使用被打赏¥31元 | |
| 【FreeRtos】FreeRtos + MPU模块的配置使用被打赏¥32元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

