
嵌入式的工程师一般都知道CAN总线广泛应用到汽车中,其实船舰电子设备通信也广泛使用CAN,随着国家对海防的越来越重视,对CAN的需求也会越来越大。这个暑假,通过参加苏州社会实践,去某船舶电气公司实习几周,也借此机会,学习了一下CAN总线。
▍概述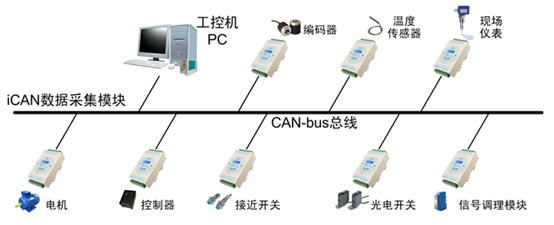
 CAN收发器负责逻辑电平和物理信号之间的转换。
CAN收发器负责逻辑电平和物理信号之间的转换。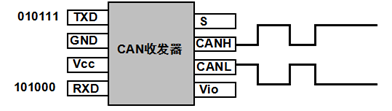 将逻辑信号转换成物理信号(差分电平),或者将物理信号转换成逻辑电平。CAN标准有两个,即IOS11898和IOS11519,两者差分电平特性不同。
将逻辑信号转换成物理信号(差分电平),或者将物理信号转换成逻辑电平。CAN标准有两个,即IOS11898和IOS11519,两者差分电平特性不同。 高低电平幅度低,对应的传输速度快;
高低电平幅度低,对应的传输速度快;
 *双绞线共模消除干扰,是因为电平同时变化,电压差不变。
*双绞线共模消除干扰,是因为电平同时变化,电压差不变。
 多个节点连接,只要有一个为低电平,总线就为低电平,只有所有节点输出高电平时,才为高电平。所谓"线与"。CAN总线有5个连续相同位后,就插入一个相反位,产生跳变沿,用于同步。从而消除累积误差。和485、232一样,CAN的传输速度与距离成反比。
多个节点连接,只要有一个为低电平,总线就为低电平,只有所有节点输出高电平时,才为高电平。所谓"线与"。CAN总线有5个连续相同位后,就插入一个相反位,产生跳变沿,用于同步。从而消除累积误差。和485、232一样,CAN的传输速度与距离成反比。 CAN总线,终端电阻的接法:
CAN总线,终端电阻的接法: 为什么是120Ω,因为电缆的特性阻抗为120Ω,为了模拟无限远的传输线
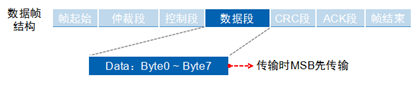
为什么是120Ω,因为电缆的特性阻抗为120Ω,为了模拟无限远的传输线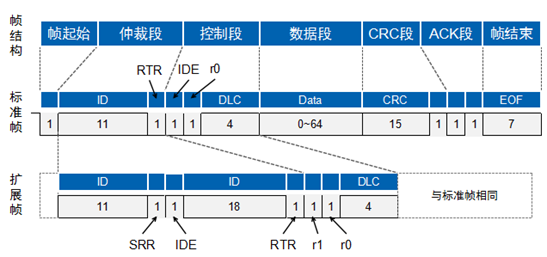 帧起始由一个显性位(低电平)组成,发送节点发送帧起始,其他节点同步于帧起始;帧结束由7个****位(高电平)组成。
帧起始由一个显性位(低电平)组成,发送节点发送帧起始,其他节点同步于帧起始;帧结束由7个****位(高电平)组成。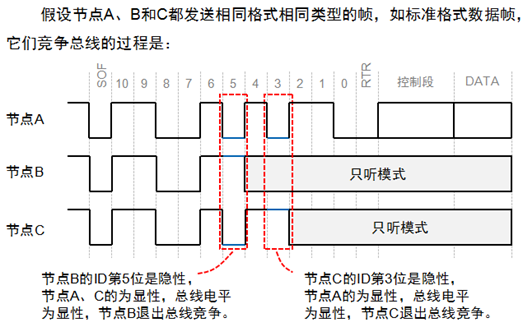 帧ID越小,优先级越高。由于数据帧的RTR位为显性电平,远程帧为隐性电平,所以帧格式和帧ID相同的情况下,数据帧优先于远程帧;由于标准帧的IDE位为显性电平,扩展帧的IDE位为****电平,对于前11位ID相同的标准帧和扩展帧,标准帧优先级比扩展帧高。
帧ID越小,优先级越高。由于数据帧的RTR位为显性电平,远程帧为隐性电平,所以帧格式和帧ID相同的情况下,数据帧优先于远程帧;由于标准帧的IDE位为显性电平,扩展帧的IDE位为****电平,对于前11位ID相同的标准帧和扩展帧,标准帧优先级比扩展帧高。
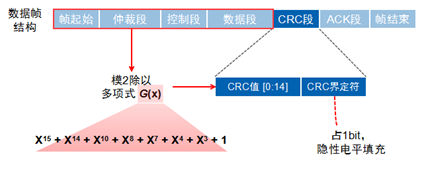
 CAN是可靠性很高的总线,但是它也有五种错误。CRC错误:发送与接收的CRC值不同发生该错误;格式错误:帧格式不合法发生该错误;应答错误:发送节点在ACK阶段没有收到应答信息发生该错误;位发送错误:发送节点在发送信息时发现总线电平与发送电平不符发生该错误;位填充错误:通信线缆上违反通信规则时发生该错误。当发生这五种错误之一时,发送节点或接受节点将发送错误帧为防止某些节点自身出错而一直发送错误帧,干扰其他节点通信,CAN协议规定了节点的3种状态及行为
CAN是可靠性很高的总线,但是它也有五种错误。CRC错误:发送与接收的CRC值不同发生该错误;格式错误:帧格式不合法发生该错误;应答错误:发送节点在ACK阶段没有收到应答信息发生该错误;位发送错误:发送节点在发送信息时发现总线电平与发送电平不符发生该错误;位填充错误:通信线缆上违反通信规则时发生该错误。当发生这五种错误之一时,发送节点或接受节点将发送错误帧为防止某些节点自身出错而一直发送错误帧,干扰其他节点通信,CAN协议规定了节点的3种状态及行为


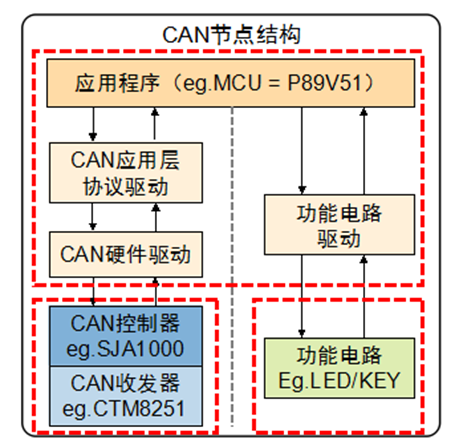 CAN收发器和控制器分别对应CAN的物理层和数据链路层,完成CAN报文的收发;功能电路,完成特定的功能,如信号采集或控制外设等;主控制器与应用软件按照CAN报文格式解析报文,完成相应控制。CAN硬件驱动是运行在主控制器(如P89V51)上的程序,它主要完成以下工作:基于寄存器的操作,初始化CAN控制器、发送CAN报文、接收CAN报文;如果直接使用CAN硬件驱动,当更换控制器时,需要修改上层应用程序,移植性差。在应用层和硬件驱动层加入虚拟驱动层,能够屏蔽不同CAN控制器的差异。一个CAN节点除了完成通信的功能,还包括一些特定的硬件功能电路,功能电路驱动向下直接控制功能电路,向上为应用层提供控制功能电路函数接口。特定功能包括信号采集、人机显示等。
CAN收发器和控制器分别对应CAN的物理层和数据链路层,完成CAN报文的收发;功能电路,完成特定的功能,如信号采集或控制外设等;主控制器与应用软件按照CAN报文格式解析报文,完成相应控制。CAN硬件驱动是运行在主控制器(如P89V51)上的程序,它主要完成以下工作:基于寄存器的操作,初始化CAN控制器、发送CAN报文、接收CAN报文;如果直接使用CAN硬件驱动,当更换控制器时,需要修改上层应用程序,移植性差。在应用层和硬件驱动层加入虚拟驱动层,能够屏蔽不同CAN控制器的差异。一个CAN节点除了完成通信的功能,还包括一些特定的硬件功能电路,功能电路驱动向下直接控制功能电路,向上为应用层提供控制功能电路函数接口。特定功能包括信号采集、人机显示等。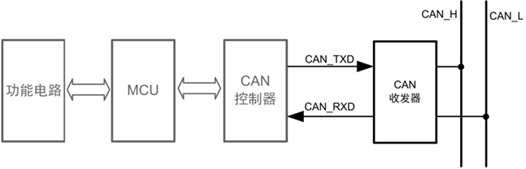 CAN收发器是实现CAN控制器逻辑电平与CAN总线上差分电平的互换。实现CAN收发器的方案有两种,一是使用CAN收发IC(需要加电源隔离和电气隔离),另一种是使用CAN隔离收发模块。推荐使用第二种。CAN控制器是CAN的核心元件,它实现了CAN协议中数据链路层的全部功能,能够自动完成CAN协议的解析。CAN控制器一般有两种,一种是控制器IC(SJA1000),另一种是集成CAN控制器的MCU(LPC11C00)。MCU负责实现对功能电路和CAN控制器的控制:在节点启动时,初始化CAN控制器参数;通过CAN控制器读取和发送CAN帧;在CAN控制器发生中断时,处理CAN控制器的中断异常;根据接收到的数据输出控制信号;
CAN收发器是实现CAN控制器逻辑电平与CAN总线上差分电平的互换。实现CAN收发器的方案有两种,一是使用CAN收发IC(需要加电源隔离和电气隔离),另一种是使用CAN隔离收发模块。推荐使用第二种。CAN控制器是CAN的核心元件,它实现了CAN协议中数据链路层的全部功能,能够自动完成CAN协议的解析。CAN控制器一般有两种,一种是控制器IC(SJA1000),另一种是集成CAN控制器的MCU(LPC11C00)。MCU负责实现对功能电路和CAN控制器的控制:在节点启动时,初始化CAN控制器参数;通过CAN控制器读取和发送CAN帧;在CAN控制器发生中断时,处理CAN控制器的中断异常;根据接收到的数据输出控制信号; 接口管理逻辑:解释MCU指令,寻址CAN控制器中的各功能模块的寄存器单元,向主控制器提供中断信息和状态信息。发送缓冲区和接收缓冲区能够存储CAN总线网络上的完整信息。验收滤波是将存储的验证码与CAN报文识别码进行比较,跟验证码匹配的CAN帧才会存储到接收缓冲区。CAN内核实现了数据链路的全部协议。
接口管理逻辑:解释MCU指令,寻址CAN控制器中的各功能模块的寄存器单元,向主控制器提供中断信息和状态信息。发送缓冲区和接收缓冲区能够存储CAN总线网络上的完整信息。验收滤波是将存储的验证码与CAN报文识别码进行比较,跟验证码匹配的CAN帧才会存储到接收缓冲区。CAN内核实现了数据链路的全部协议。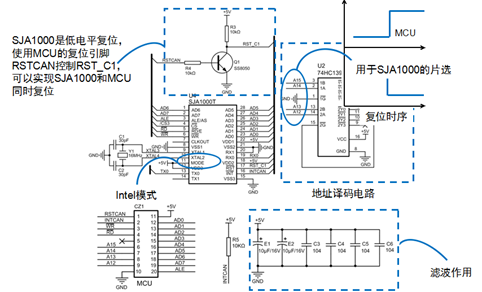 收发器按照通信速度分为高速CAN收发器和容错CAN收发器。同一网络中要使用相同的CAN收发器。CAN连接线上会有很多干扰信号,需要在硬件上添加滤波器和抗干扰电路
收发器按照通信速度分为高速CAN收发器和容错CAN收发器。同一网络中要使用相同的CAN收发器。CAN连接线上会有很多干扰信号,需要在硬件上添加滤波器和抗干扰电路 也可以使用CAN隔离收发器(集成滤波器和抗干扰电路)。
也可以使用CAN隔离收发器(集成滤波器和抗干扰电路)。
 CAN控制器与MCU的连接方式
CAN控制器与MCU的连接方式 SJA1000可被视为外扩RAM,地址宽度8位,最多支持256个寄存器
SJA1000可被视为外扩RAM,地址宽度8位,最多支持256个寄存器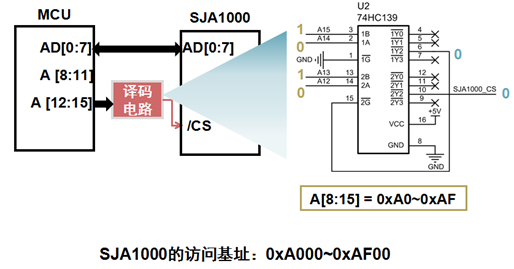

#defineREG_BASE_ADDR0xA000//寄存器基址unsignedchar*SJA_CS_Point=(unsignedchar*)REG_BASE_ADDR;//写SJA1000寄存器voidWriteSJAReg(unsignedcharRegAddr,unsignedcharValue){*(SJA_CS_Point+RegAddr)=Value;return;}//读SJA1000寄存器unsignedcharReadSJAReg(unsignedcharRegAddr){return(*(SJA_CS_Point+RegAddr));}

 将缓存区的数据连续写入寄存器
将缓存区的数据连续写入寄存器……for(i=0;i<len;i++){WriteSJAReg(RegAdr+i,ValueBuf[i]);}……
将连续多个寄存器连续读入缓存区……for(i=0;i<len;i++){ReadSJAReg(RegAdr+i,ValueBuf[i]);}……
 头文件包含方案:
头文件包含方案:- 每个程序包含用到的头文件
- 每个程序包含一个公用头文件,公用头文件包含所有其他头文件
#ifndef__CONFIG_H__//防止头文件被重复包含#define__CONFIG_H__#include<8051.h>//包含80C51寄存器定义头文件#include"SJA1000REG.h"//包含SJA1000寄存器定义头文件//定义取字节运算#defineLOW_BYTE(x)(unsignedchar)(x)#defineHIGH_BYTE(x)(unsignedchar)((unsignedint)(x)>>8)//定义振荡器时钟和处理器时钟频率(用户可以根据实际情况作出调整)#defineOSCCLK11059200UL//宏定义MCU的时钟频率#defineCPUCLK(OSCCLK/12)#endif//__CONFIG_H__
SJA1000上电后处于复位状态,必须初始化后才能工作。(1)置位模式寄存器Bit0位进入复位模式;(2)设置时钟分频寄存器选择时钟频率、CAN模式;(3)设置验收滤波,设定验证码和屏蔽码;(4)设置总线定时器寄存器0、1设定CAN波特率;(5)设置输出模式;(6)清零模式寄存器Bit0位退出复位模式;模式寄存器 只检测模式:SJA1000发送CAN帧时不检查应答位;只听模式:此模式下SJA1000不会发送错误帧,用于自动检测波特率;SJA1000以不同的波特率接收CAN帧,当收到CAN帧时,表明当前波特率与总线波特率相同。
只检测模式:SJA1000发送CAN帧时不检查应答位;只听模式:此模式下SJA1000不会发送错误帧,用于自动检测波特率;SJA1000以不同的波特率接收CAN帧,当收到CAN帧时,表明当前波特率与总线波特率相同。
1.检测状态寄存器,等待发送缓冲区可用;2.填充报文到发送缓冲区;3.启动发送。
 SJA1000具有一个12字节的缓冲区,要发送的报文可以通过寄存器16-28写入,也可通过寄存器96-108写入或读出
SJA1000具有一个12字节的缓冲区,要发送的报文可以通过寄存器16-28写入,也可通过寄存器96-108写入或读出
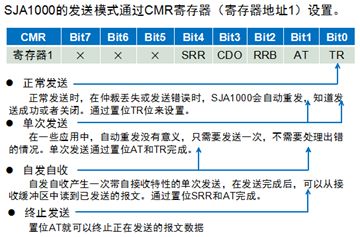 设置发送模式
设置发送模式charSetSJASendCmd(unsignedcharcmd){unsignedcharret;switch(cmd){default:case0:ret=SetBitMask(REG_CAN_CMR,TR_BIT);//正常发送break;case1:ret=SetBitMask(REG_CAN_CMR,TR_BIT|AT_BIT);//单次发送break;case2:ret=SetBitMask(REG_CAN_CMR,TR_BIT|SRR_BIT);//自收自发break;case0xff:ret=SetBitMask(REG_CAN_CMR,AT_BIT);//终止发送break;}returnret;}
发送函数unsignedcharSJA_CAN_Filter[8]={//定义验收滤波器的参数,接收所有帧0x00,0x00,0x00,0x00,//ACR0~ACR30xff,0xff,0xff,0xff//AMR0~AMR3};unsignedcharSTD_SEND_BUFFER[11]={//CAN发送报文缓冲区0x08,//帧信息,标准数据帧,数据长度=80xEA,0x60,//帧ID=0x7530x55,0x55,0x55,0x55,0xaa,0xaa,0xaa,0xaa//帧数据};voidmain(void)//主函数,程序入口{TImerInit();//初始化D1=0;SJA1000_RST=1;//硬件复位SJA1000TImerDelay(50);//延时500msSJA1000_RST=0;SJA1000_Init(0x00,0x14,SJA_CAN_Filter);//初始化SJA1000,设置波特率为1Mbps//无限循环,main()函数不允许返回for(;;){SJASendData(STD_SEND_BUFFER,0x0);TImerDelay(100);//延时1000ms}}
为什么帧ID是0x753,这与CAN帧在缓冲区的存储格式有关。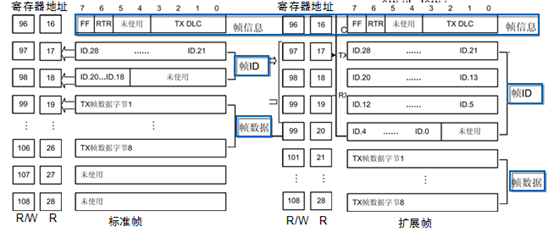
 终端电阻非常重要,当波特率较高而且没加终端电阻时,信号过冲非常严重。
终端电阻非常重要,当波特率较高而且没加终端电阻时,信号过冲非常严重。 SJA1000有64个字节的接收缓冲区(FIFO),这可以降低对MCU的要求。MCU可以通过查询或中断的方式确定SJA1000接收到报文后读取报文。
SJA1000有64个字节的接收缓冲区(FIFO),这可以降低对MCU的要求。MCU可以通过查询或中断的方式确定SJA1000接收到报文后读取报文。 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

