
在机械结构的振动过程中,许多微弱信号包含机械运动的丰富特征信息,如故障特征信息等,有必要提取出来加以分析。而在微弱信号提取过程中,有时信号非常微弱,极易受到外界的干扰而淹没于强噪声之中,有时被测信号振幅变化范围又很大,给信号采集带来很大困难。放大电路本身的噪声性能和频率特性也将影响到信号的提取精度。对振动信号的采集及处理,通常是用普通的数据采集系统去采集,然后用数字信号处理的方法来提取数据的特征信息。但是,一些由采集系统的不足对信息造成的损失,是后期的数字信号处理无法补偿的。振动信号的检测是机械系统状态监测和早期故障诊断的关键,机械系统早期故障引起的异常振动信号有时都很微弱而且持续时间短,信噪比低,容易淹没于背景噪声中。这对信号检测技术提出了很高的要求。针对此情况,本文考虑设计一个微弱振动信号自适应采集系统,能够根据被测信号的振幅实时地调节放大器的增益,从而检测出微弱振动信号。
1系统框图与结构原理
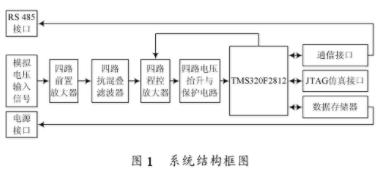
在结构设计中,设计了四路预处理通道,以提高系统的稳定性和快速性。考虑到采集对象是微弱信号,在每路程控放大器前设计了低噪声前置放大器,且每一路程控放大器的增益控制信号直接来自DSP。程控放大器之前设有抗混叠低通滤波器以滤去信号中混有的高频噪声,减小了噪声对信号的影响,在每一路中也设置一个抬压与保护电路,使输入的信号电压稳定在O~3V之间。
2硬件电路设计
2.1前置放大器的设计
本数据采集系统的对象为微弱信号,需要用前置放大器进行放大。由于测量放大器具有输入阻抗高、输出阻抗低、抗共模干扰能力强、低温漂、低失调电压和高稳定增益等特点,在微弱信号的检测系统中广泛用作前置放大器。
本数据采集系统采用AD公司的高性能运放AD620作为测量放大器,AD620是一种只用一个外部电阻就能设置放大倍数为1~1000的低功耗/高精度仪表放大器。AD620具有很好的直流特性和交流特性,最大输入失调电压漂移为1μV,其共模抑制比大于93dB。在1kHz处输入电压噪声为9nV/Hz。在0.1~10Hz范围内输入电压噪声的峰一峰值为0.28μV,输入电流噪声为O.1pA/Hz。G=1时,它的增益带宽为120kHz,建立时间为15μs。因此AD620的性能满足该数据采集系统的要求。
2.2程控放大电路设计
2.2.1DSP芯片的性能特征
2.2.2DAC20832芯片的性能特征
DAC0832是AD公司生产的高精度、低功耗、8位数模转换器,能完成数字量输入到模拟量(电流)输出的转换。DAC0832具有数字输入锁存的功能。DAC0832的互补输出端Ioutl,Iout2均为电流信号,且之和为常数。其主要参数如下:分辨率为8位,转换时间为1μs,参考电压为-10~+10V,供电电源为+5~+15V,逻辑电平输入与TTL兼容。DAC20832具有两级锁存器,第一级锁存器称为输人寄存器,它的允许锁存信号为ILE,第二级锁存器称为DAC寄存器。
2.2.3程控放大电路的组成
程控放大电路由DAC0832芯片、高精度放大器LM357和反馈电阻组成,受TMS320F2812芯片的控制信号、片选信号控制,如图2所示。DAC0832用作程控放大器,是把DAC0832的参考电压端接输入信号,数字信号输入端接TMS32OF2812芯片的控制信号,互补输出端Iout1和Iout2引脚分别接放大器LM357的反向输入端和同向输入端。DAC0832的互补输出端Ioutl、Iout2均为电流信号,需外接一个放大器实现电流信号到电压信号转换。T型电阻网络的电阻是10KΩ,接一个阻值为2.55MΩ反馈电阻Rf,就构成一个程控放大器。用该程控放大电路可以实现增益为:20,21,22,…,28-1,从而扩大了被测信号的范围。
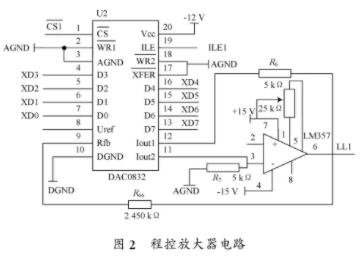
其中:8号引脚Uref是模拟电压输入端,接前置放大器的输出端;CS1和ILEl是来自。DSP芯片的片选与使能信号;XD0~xD7是来自DSP芯片的增益控制信号;DAC0832芯片的Ioutl和Iout2引脚分别接放大器LM357的反向输入端2和同向输入端3;R66为反馈电阻Rf,LLl为放大器输出端。
2.3滤波电路设计
有源滤波器不仅体积小,而且输出阻抗和截止频率fc无关,能够前、后级之间相互独立的设计。巴特沃斯低通滤波器具有通频带比较平坦,且下降快等优点。在该系统的滤波器设计中,采用多重反馈型5阶巴特沃斯低通滤波器。
2.4电压抬升与保护电路设计
电压抬升电路由一个OP放大器和一个1.5V的抬压基准构成。OP放大器的同相输入端接一个稳定的1.5V基准电压,反相输入端接信号输人端,放大器的增益设置为1,这就实现输入信号的电压反相,且抬压1.5V。保护电路由一个3V的稳压管和二极管组成,保证经过电路的电压在O~3V范围内。
3算法设计与软件流程实现
TMS320F2812芯片的A/D转换器每次可以采集16路信号,而该采集系统仅有四路输入信号,可以实现简单的过采样,提高采集数据的精度。首先对采集到的信号进行过采样处理,然后计算采集到的信号的幅值,并与设定值做比较以判断调节程控放大器与否,同时把采集到的数据除以其对应的放大增益和进行数字滤波,结果存放在数组中,数组中的数据通过异步串口SCI向上位PC机传输。
3.1信号幅值检测的算法
在程控放大器的设计中,对被测信号振幅的检测至关重要,它是实现程控放大的关键。以往的程控放大器,多数是根据被测信号的幅值来调节程控放大器的放大倍数,此方法比较合适于直流信号的检测。交流信号的幅值是变化的,若根据被测信号的幅值调节程控放大器的增益,需要时刻改变程控放大器的增益,这将浪费CPU的很多资源,影响了A/D转换的速度,限制了被测信号的范围,因器件程序的计算和器件的延时也会给测量结果带来很大的误差,不适合做高频信号的采集,而且很难满足实时性要求。一般信号的振幅是基本不变或者变化很慢,若根据信号的振幅调节程控放大器的增益,就不需要时刻调节放大器的增益,从而节约CPU的资源,减小采集带来的误差,提高采集数据的准确度。
信号幅值的检测是利用正交锁相型放大器的原理实现的[2],如图3所示。被测信号为x(t),参考信号为r(t)。
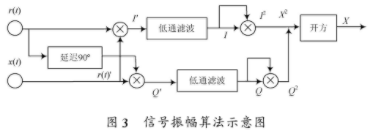

在数据采集实验中,通过简单的计算可以得到信号的振幅,并与设定的数值区间做比较,根据比较的结果来调节DAC0832的增益,从而实现放大器根据被测信号的振幅来调节自身的增益,实现信号的自适应放大。
3.2系统软件实现
DSP2812的编程工具有C语言和汇编语言两种。采用C语言编程,代码可读性、可移植性强,无需详细了解DSP的硬件就可以上手编程,降低了编程难度。一般应用于实时性要求不是特别高的场合。对于高速实时应用,采用C语言和汇编语言混合编程的方法,能把C语言的优点和汇编语言的高效率有机结合起来。系统流程图如图4所示。
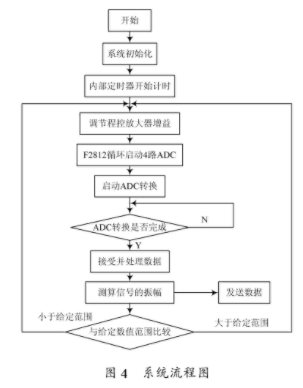
程序算法描述如下:
Step1:开始;
Step2:系统初始化I2;
Step3:A/D转换;
Step4:数据处理;
Step5:数据滤波;
Step6:计算信号振幅;
Step7:是否调节程控放大器,如不需要跳转到Step3;
Step8:调节程控放大器增益;
Step9:跳转到Step3;
Step10:结束。
4实验结果与分析
4.1采集系统实时仿真
信号采集系统设计完成后,对采集系统的性能进行检验。以振幅为0.00001V、频率为100Hz的正弦信号作为待采集的信号,如图5(a)所示,并混有白噪声作为采集系统的输入信号,输入信号的波形如图5(b)所示。经过放大、滤波及电压抬升之后的信号波形如图5(c)所示。
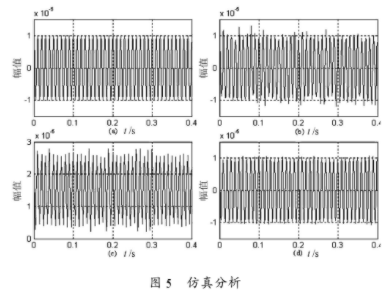
在DSP里对采集到的信号进行处理,把采集到的信号数据还原为采集前的情况,如图5(d)所示。
有图5(c)可见采集到的信号电压均在0~3V之间,适合DSP的如入范围,实现了根据信号振幅对信号进行程控的目的。图5(d)是经过简单处理后得到的信号的波形,可以计算出被采集信号的频率为100Hz、振幅约为10-5V。与图5(b)相比恢复后的信号噪声小了很多,基本和原始信号图5(a)给出的波形相同。由实验结果可知,该系统达到了设计的目标,满足实验的需要。
4.2实验比较
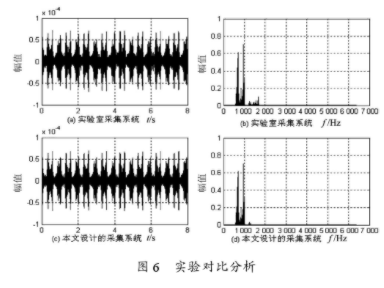
在实验中,用实验室的动态信号测试分析系统(江苏东华测试有限公司的DH5935N)和本文设计的微弱振动信号自适应采集系统同时对试件进行振动信号采集和处理,采样频率为12800Hz。图6(a)和图6(b)为由实验室采集系统得到数据信号的波形图和频谱图,图6(c)和图6(d)为由本文设计的采集系统的波形图和频谱图。可以看出本文设计的系统不仅具有自适应调节放大器增益的功能,还具有高速度、低噪声、无失真的特性。
5结语
(1)所设计的系统能根据被测信号的振幅自动调节放大器的增益,从而自适应地完成对不同幅值振动信号的测量和处理,降低了数据采集过程中程控放大器增益的频率,节约了CPU开销。
(2)系统采用TMS320F2812DSP芯片作为核心处理器,DAC0832作为被测信号的振幅控制器,实现了自适应放大器增益的自适应调整,实现检测信号电压不低于1μV,扩大了被测信号的幅值范围。
(3)具有体积小、低功耗、可靠性高和扩展性强等优点。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

