
写在前面几乎所有 RTOS 操作系统都提供了队列和信号量的功能,对于大部分新手来说,使用队列和信号量是必备技能。
但是,在大多数情况下,他们都是使用“中介对象”进行通信,而并非“直接任务消息”通信。
通过“中介对象”进行通信,每一组队列或信号量都会分配一段内存(消息缓冲区和流缓冲区)。就存在一个问题,如果队列或信号量比较多,势必造成更大的内存开支。
但是,如果通过本文说的“直接消息”通信,会节约很多内存。
什么是直接任务通知?大多数任务间通信方法都通过中介对象,例如队列,信号量或事件组。发送任务写入通信对象,接收任务从通信对象读取。
比如 FreeRTOS 的队列通信,首先创建队列之前要定义一个队列:
QueueHandle_txQueue;xQueue=xQueueCreate(10,sizeof(/*长度*/));而这个队列包含了很多中介对象:
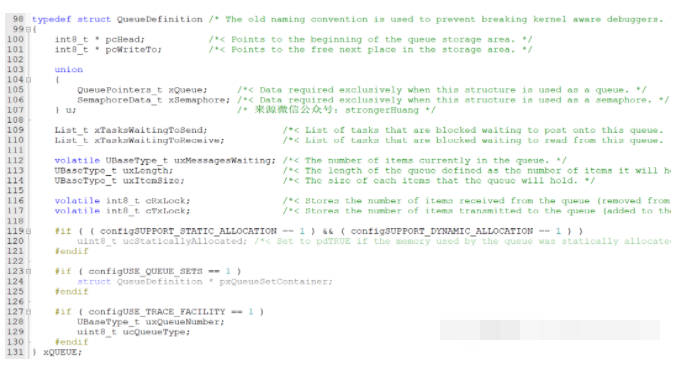
大家可以算一下这个“中介对象”会占用多少RAM空间?
通过一个代码示意图理解中介对象通信:

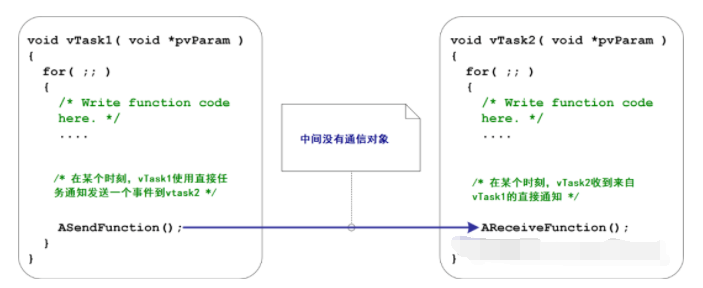
直接任务通知:当使用直接任务通知时,顾名思义,发送任务将通知直接发送给接收任务,而无需中介对象。
通过一个代码示意图理解:
从FreeRTOSV10.4.0开始,每个任务都有一系列通知。每个通知都包含一个32位值和一个布尔状态,它们一起仅消耗5个字节的RAM。
就像任务可以阻止二进制信号量等待该信号量变为“可用”一样,任务可以阻止通知以等待该通知的状态变为“待处理”。同样,就像任务可以阻止计数信号量以等待该信号量的计数变为非零一样,任务可以阻止通知以等待该通知的值变为非零。下面的第一个示例演示了这种情况。
通知不仅可以传达事件,还可以通过多种方式传达数据。
3
进一步分析直接任务通知通过对比FreeRTOSV10.4.0和之前版本,你会发现V10.4.0多了一些API,比如ulTaskNoTIfyTake/ulTaskNoTIfyTakeIndexed:
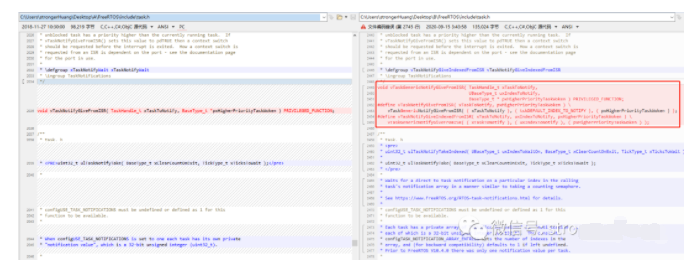
在官网也有针对这些API的详细介绍和说明,以及应用代码例子:

4
使用直接任务通知性能优势和使用限制任务通知的灵活性使它们可以在需要创建单独的队列、二进制信号量、数信号量或事件组的情况下使用。
与使用中介对象(例如信号量)来取消阻止任务相比,使用直接通知取消阻止RTOS任务的速度快了45%(来自官方数据),并且使用的RAM更少。
当然,有这些性能优势,也肯定一些限制:
仅当只有一个任务可以作为事件的接收者时,才可以使用RTOS任务通知。但是,在大多数实际使用情况下都可以满足此条件,例如中断使执行任务处理的任务中断时,该任务将处理该中断接收的数据。
仅在使用RTOS任务通知代替队列的情况下:接收任务可以在“阻塞”状态下等待通知(因此不占用任何CPU时间),而发送任务不能在“阻塞”状态下等待消息。如果发送无法立即完成,则发送完成。
5
使用方法使用方法其实很简单,只要你会使用RTOS的队列、信号量,基本看一眼官方例子就能使用。
我这里也拿官方例子说明一下:
/*main()创建的两个任务的原型*/staTIcvoidprvTask1(void*pvParameters);staTIcvoidprvTask2(void
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

