
这个项目的目标是建造一个物联网风格的电动宠物门,这样我们就可以控制哪些动物可以进入房子。为此,我们使用附着在动物(猫)上的BLE标签和RaspberryPi3上的内置蓝牙模块来扫描标签。同时我们还在RaspberryPi3上配备了一些LED指示灯,用于对门应该处于的状态进行故障排除。
Node-REDBLEScan节点持续扫描BLE广告。如果它看到与设备名称和最小RSSI匹配的设备,它将打开宠物门,并在超时后关闭门。为了防止门在缓慢移动的动物身上过早关闭,系统将在获得BLE匹配时重置计时器。
这个项目有几个不同的部分:
硬件:操纵门所需的所有布线和组件
软件:决定门应该向哪个方向移动的所有逻辑。

硬件
门的打开和关闭由一个12VDC电动汽车天线完成,该天线倒置安装在门上方,天线的末端连接到门本身。并带有一个电路,可以对其进行逆向工程以控制天线,但我们在这里不通过这种方式,因此您需要将电路撕掉并直接使用电机线。
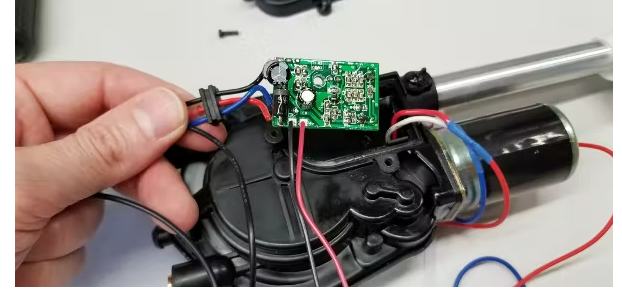
要驱动天线电机,您很可能需要至少1A的12V电源。我使用了一个旧的D-Link路由器电源:

您需要在门上安装两个限位开关以停止两端的电机。我使用了磁性开关,因为这是我手头有的现成的东西,但是带有杠杆臂的标准开关会更好。

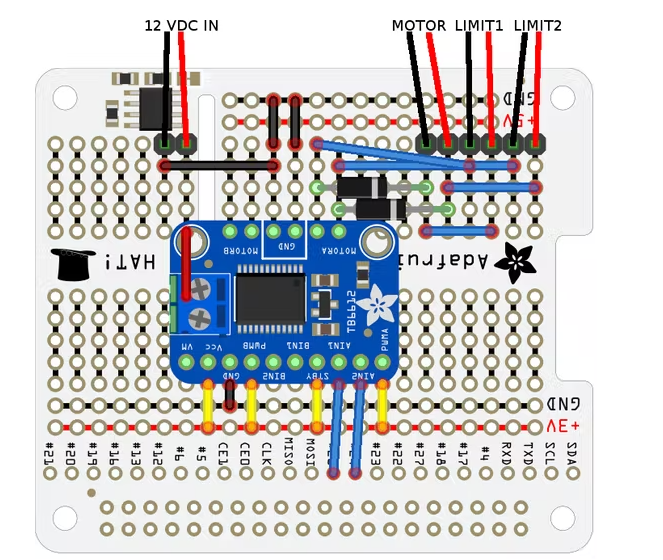
根据下图组装H桥PiHat,注意二极管的方向;这是限制电路。使用的H桥是双通道的,但我们现在只使用一个。如图所示,电机、开关和12VDC输入将连接到PiHat。
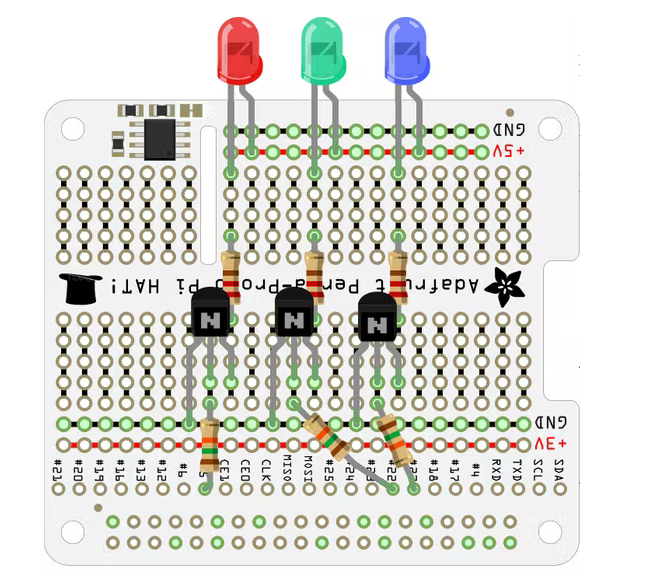
根据下图组装LEDPiHat。蓝色LED需要的电流比Pi能够通过GPIO可靠提供的电流多一点,因此我们从5V线路为所有LED供电,并使用连接到GPIO的晶体管来切换它们。
软件
该项目的软件只是在标准Raspbian安装上运行的Node-RED。大多数逻辑都是使用带有RPi版本node-red的标准节点处理的,但BLE扫描仪除外,它需要来自node-red-contrib-noble的“scanble”节点。按照以下链接中的说明设置组件:
安装Raspbian
安装Node-RED
安装node-red-contrib-noble
在一切都安装并工作后,继续配置您的Node-RED流程,使其看起来像这样:
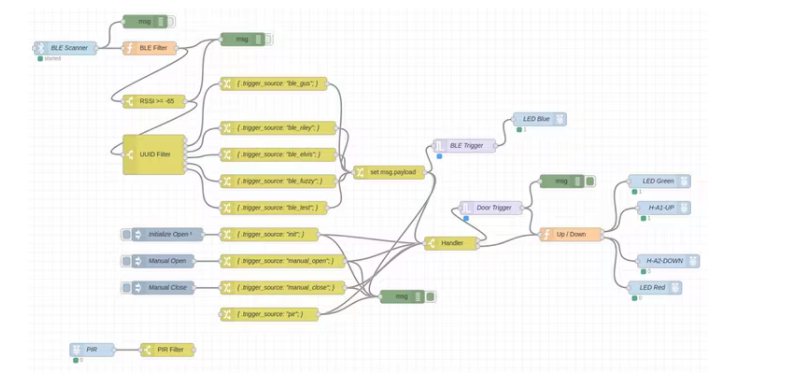
我们的流程入口点是“scanble”节点;确保选中该框以允许重复。
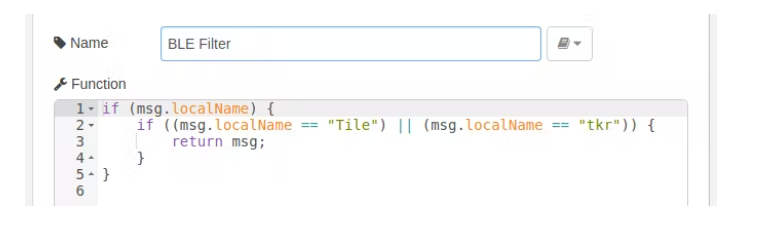
之后添加一个“function”节点来根据“localname”属性过滤BLE广告;我使用了使用“Tile”作为本地名称的TileTracker标签。
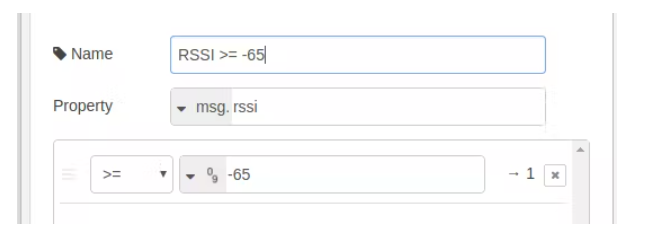
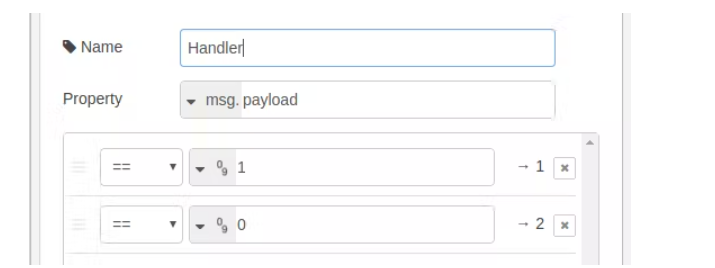
接下来是一个“切换”节点,用于检查广告的RSSI。您需要调整此设置以匹配标签和开门距离。
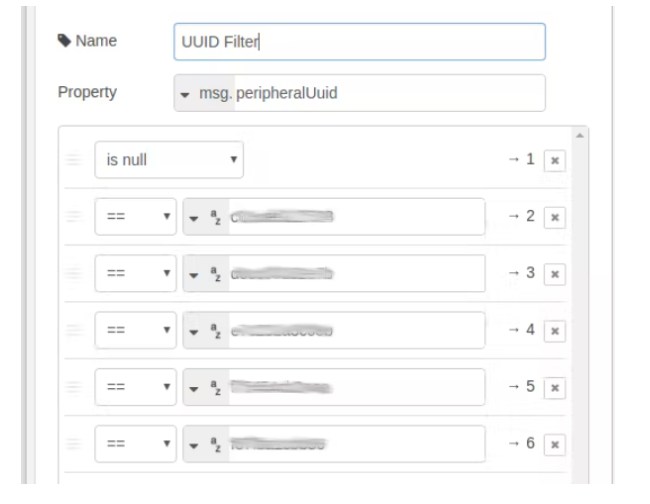
然后,您可以添加另一个“开关”节点来根据标签的唯一ID过滤标签,这样它就不会在门附近的其他标签上触发。如果您还不知道唯一ID,您可以使用“scanble”节点上的调试节点来查看广告并尝试查看哪个是您的。设置第一条规则匹配一个空UUID并且不连接输出;这将过滤掉一些垃圾广告,为每个UUID添加附加规则。
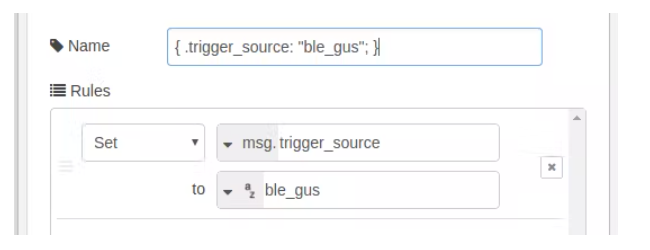
为您在前一个节点中添加的每个规则添加一个“更改”节点,并为其赋予一个唯一的“触发源”值。这些节点不是必需的,但它们将使您能够在将来对每个标签进行额外的过滤,我用我的猫的名字作为来源。
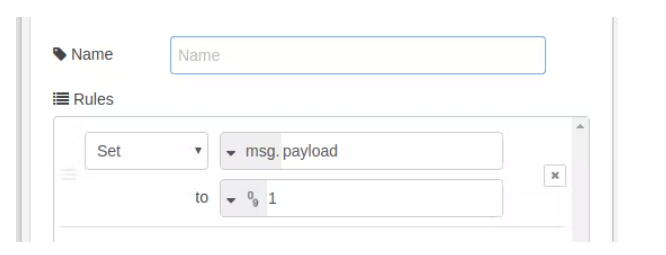
接下来,我们需要通过将消息有效负载更改为1来告诉流的其余部分我们想要触发门打开。将任何打开的触发源连接到此节点。
现在这个触发消息将做两件事:触发蓝色LED闪烁以接收BLE数据包,并触发门打开。
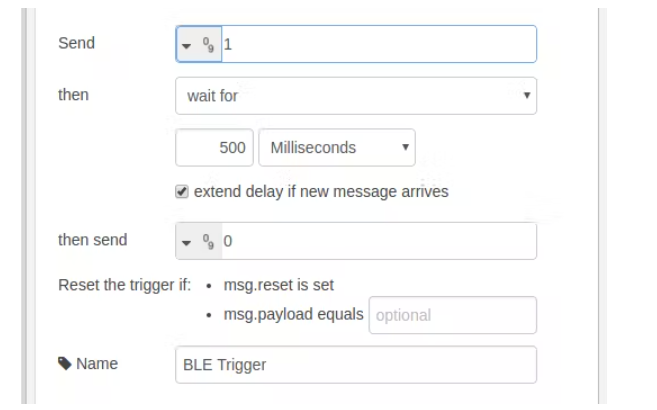
首先通过添加“触发器”节点来设置LED路径。将其设置为发送1,然后在500毫秒后发送0。这将导致LED仅闪烁一次。
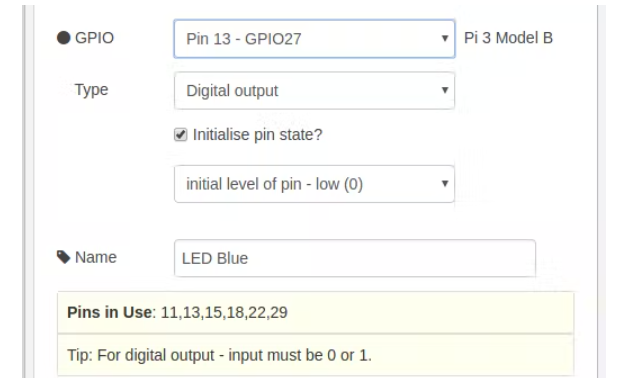
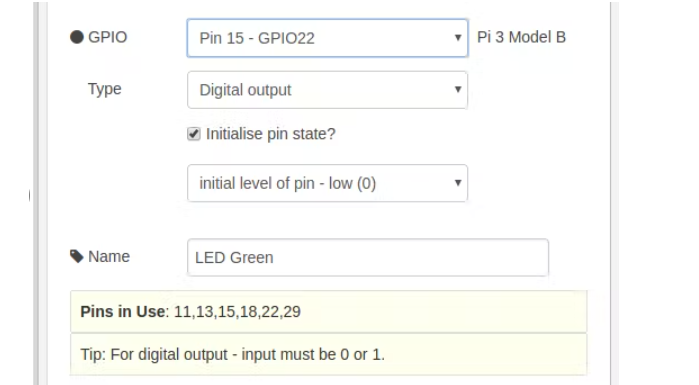
到该节点连接一个“rpigpio”输出节点并将其配置为蓝色LEDGPIO。将其设置为初始化为0(关闭)状态。
接下来是配置门触发路径。返回触发有效负载节点并将“更改”节点与两个输出连接。一个输出将路由到具有“1”有效负载的开放路径,另一个将路由到具有“0”有效负载的关闭路径。
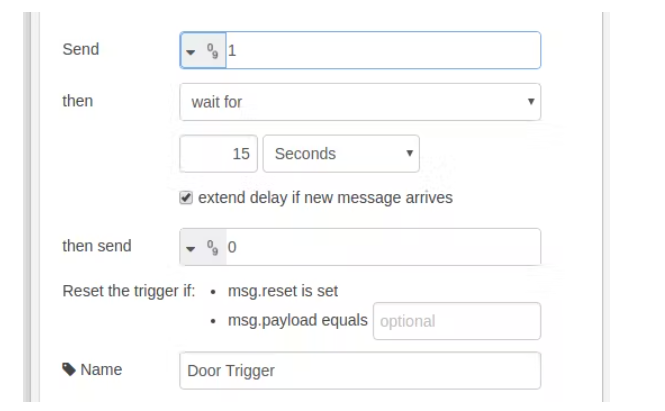
这两个输出都将连接到同一个节点,但打开的连接在路径中有一个额外的触发节点,可以在超时后触发关闭。添加“触发”节点以发送“1”,然后在超时(15秒)后发送“0”。
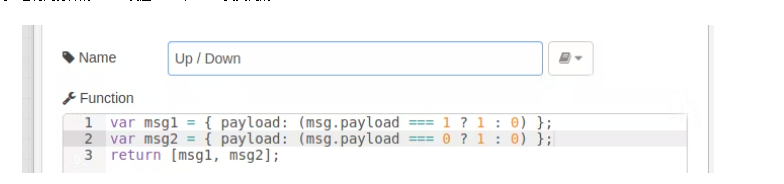
然后将该触发节点和前一个节点的第二个输出连接到“功能”节点。此功能节点有两个输出连接到打开的GPIO节点和关闭的GPIO节点。由于您不希望门同时打开和关闭,因此它将向每个输出发送相反的值。因此,如果触发有效载荷为“1”表示打开,它将向打开的GPIO发送“1”,向关闭的GPIO发送“0”,如果有效载荷为“0”表示关闭,它将向打开的GPIO发送“0”和“1”到关闭的GPIO。
最后,将两个GPIO节点连接到每个输出:一个用于LED,一个用于H桥输入。
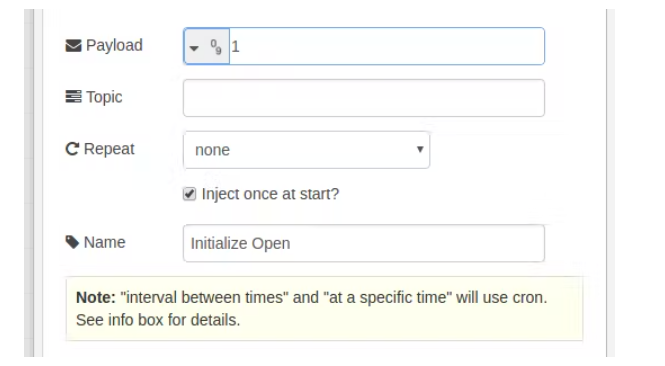
这应该对主要的Node-RED流程执行此操作。此外,您应该添加一个“注入”节点以自动“1”有效负载以在启动时打开门,这样流程就知道门处于哪个状态。我还添加了一些手动注入节点,用于通过Node-RED接口。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

