
决定如何提高性能是一项标准设计挑战,尤其是在涉及模拟传感器和信号通道时。三种常用的方法包括:
使用更好的组件来降低漂移、容差、偏置电流或噪声以及更高的带宽和更多的驱动。
采用电路拓扑结构,如桥接或差分设计,消除部分或大部分错误,或控制一些导致错误的因素,如温度。
校准传感器或电路并使用结果来改进(通常是线性化)模拟方案中的信号或作为数据缩减期间的校正因子。
这些技术,尤其是前两种技术,被已故的 Jim Williams 和 Bob Pease 在他们的设计和相关文章中广泛采用。一个很好的例子,参见 Jim 1976 年的经典EDN文章“这个 30 ppm 的比例证明模拟设计还没有死”;尽管它已经有将近 50 年的历史,但它仍然有很多重要的经验教训(图 1)。
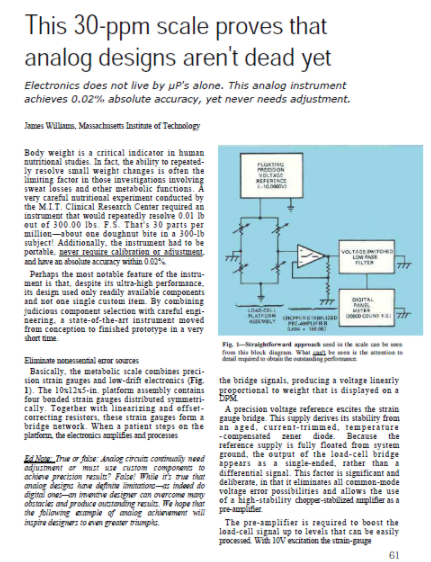
图 1 Jim Williams关于高精度、超稳定称重秤的设计和误差最小化的EDN文章的第一页清楚地表明,它实现了 30 ppm 绝对精度 (0.02%) 的性能,并且无需在场地。
还有另一种提高性能的方法:添加某种主动消除电路来消除违规行为。当然,这并不是什么新鲜事,因为它多年来一直用于各种应用,例如降噪耳机或用于在敏感光学平台中最小化振动的主动阻尼(图 2)。
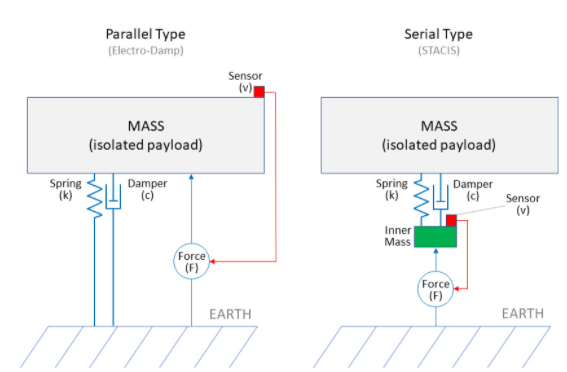
图 2光学平台的主动振动控制系统使用并联或串联的支撑弹簧和消除致动器来衰减由静态隔离装置消除的较大振动的残余。资料来源:TMC/AMETEK Ultra Precision Technologies
近年来,用于提高性能的主动方法和相关电路的使用有所增加,现在涵盖了以前由被动方法处理的情况。德州仪器 (TI) 最近的一篇博客“如何使用集成有源 EMI 滤波器降低 EMI 和缩小电源尺寸”展示了如何解决开关电源的噪声问题。请注意,此任务已被简化,因为此噪声的关键属性——它的频率——是已知的。
当然,在许多情况下,噪声和其他误差源的属性是未知的,但仍然值得尝试使用有源方案进行衰减。这样做听起来可能是个好主意——而且确实可以——但动态补偿和校正方案的实施很复杂,并且有许多微妙之处。与所有闭环情况一样,某些反馈环类型和参数(例如时间常数)充其量只会导致微小的改进,甚至会导致性能下降。
再者,还有环路饱和等问题需要分析和处理,所以可以说解决方案不会爆。最后,添加传感器和其他闭环组件会产生成本和空间影响,尽管这些影响可能不如使用复杂的机械减振方案严重。
我认为我们会看到更多这样的先进方法,包括动态闭环补偿,因为成本和功耗方面的成本和所需硬件的尺寸会下降,同时它们会显着提高整体性能。尽管如此,如果不仔细分析它需要什么、可能产生什么以及可能出现什么问题,它就不是一种可以实施的方法。
我的一般感觉是,当面临解决严重问题的挑战时,这些基于传感器的主动补偿方案特别有效且可行。例如,声学降噪耳机和系统就是这种情况,其目标不是完全消除外部噪音,这是无法做到的,也根本没有必要这样做,而只是将其衰减可能20 到 40 分贝。
相比之下,如果您使用闭环方案从非常非常好的性能变为真正出色的性能,那么挤出最后一滴可能会成为一个挑战。改进方案也可能带来许多不利因素,其中一些是您可以预料到的,有些是您可能无法预见的。换句话说,使用取消来达到 80% 或 90% 是一回事,而从 98% 到 99.99% 则更具挑战性,并且容易出现意外惊喜,而且成本更高。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

