
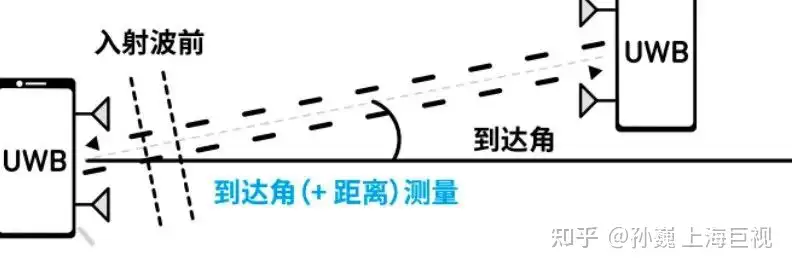
基于UWB AOA 作为地标比蓝牙信标作为地标有相当大的优势:目标可以基于AOA得到位置空间坐标和行径信息;蓝牙只是信号可及,不支持坐标,无法得到方向和行径信息。UWB AOA更像是支持方向的路牌;

利用AOA的方位测量,可以解决很多几何学的对称问题:利用UWB AOA可以很好解决空间几何学“孪生”的问题;
UWB AOA工业应用场景-车辆定位
工业现场无人驾驶场景:

辅助自动驾驶
工业现场的AGV车等无人驾驶的移动设备,一般会采用基于雷达或视频的SLAM技术实现自动的定位、制图、路径规划及导航;
如果AVG车可以实时的知晓自身的精准坐标,这就大大简化AGV自动驾驶。在工业环境中,要想基于TDOA或者TOF的三角定位实现实时坐标的定位,难度很大,蓝牙AOA的锚点****的安装方式也是有很大局限性。
可行的办法是在AGV的活动区域,部署若干UWB坐标参考点,当AGV行驶到附近(5-10米),可以基于AGV车上的AOA 锚点,解算出AGV自身精准坐标,实现SLAM算法中IMU里程或视频里程的修正。

相比二维码地标,UWB坐标参考点有很多优势:二维码要依赖视频发现和识别,利用像素估算距离,受环境照度的影响大,精度不高;UWB AOA坐标参考点可以用于任意环境,定位精度高,同时可以基于多参考点同时定位,提高定位的准确性;
UWB坐标参考点可以很小(可参考类似Air TAg大小)、功耗很低支持电池供电,部署安装十分方便;AGV的UWB AOA锚点体积也很小、功耗低;
UWB坐标参考点可以也可以设计成同时支持AOA,最大的好处就是支持参考点直接的自动坐标系生成,无需大量参考点坐标的测绘。
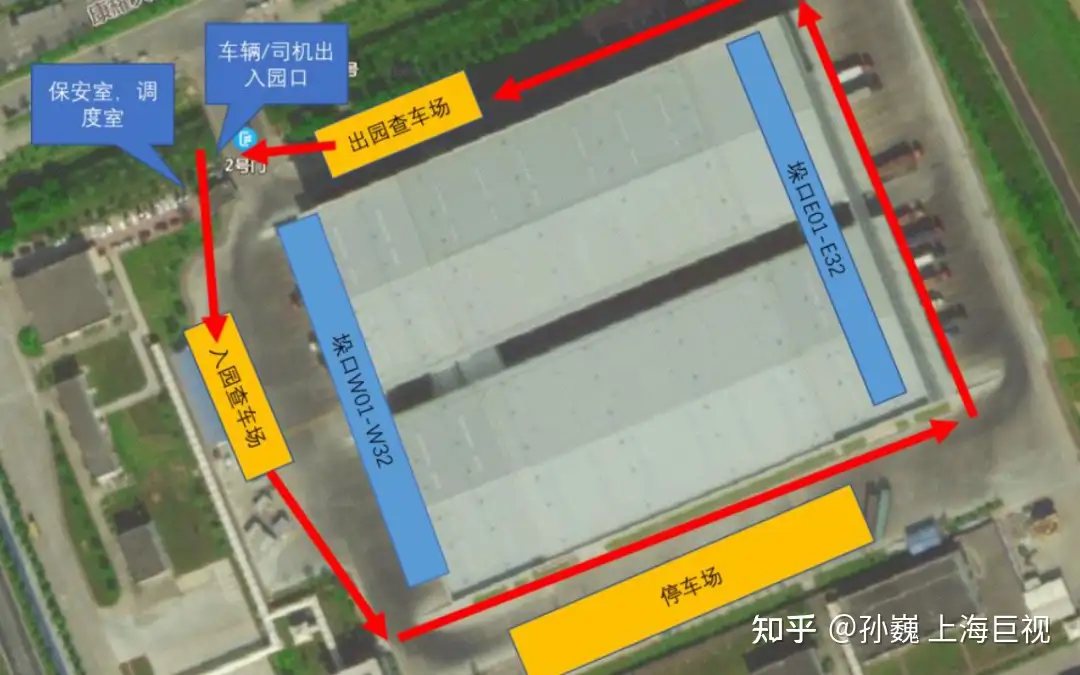
UWB AOA适合工业现场车辆的定位,在车辆的行驶路径部署锚点或者在关键点部署锚点,可以得到车辆的位置信息,车辆也可以同时获得自身的坐标定位信息,实现辅助自动驾驶;也可以路口处部署,指导驾驶方向或者碰撞碰撞等;

靠垛判断:
判断前来垛口的车辆是否为当前垛口绑定的车辆,记录靠垛/离垛时间

 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

