

问题描述及复现步骤:
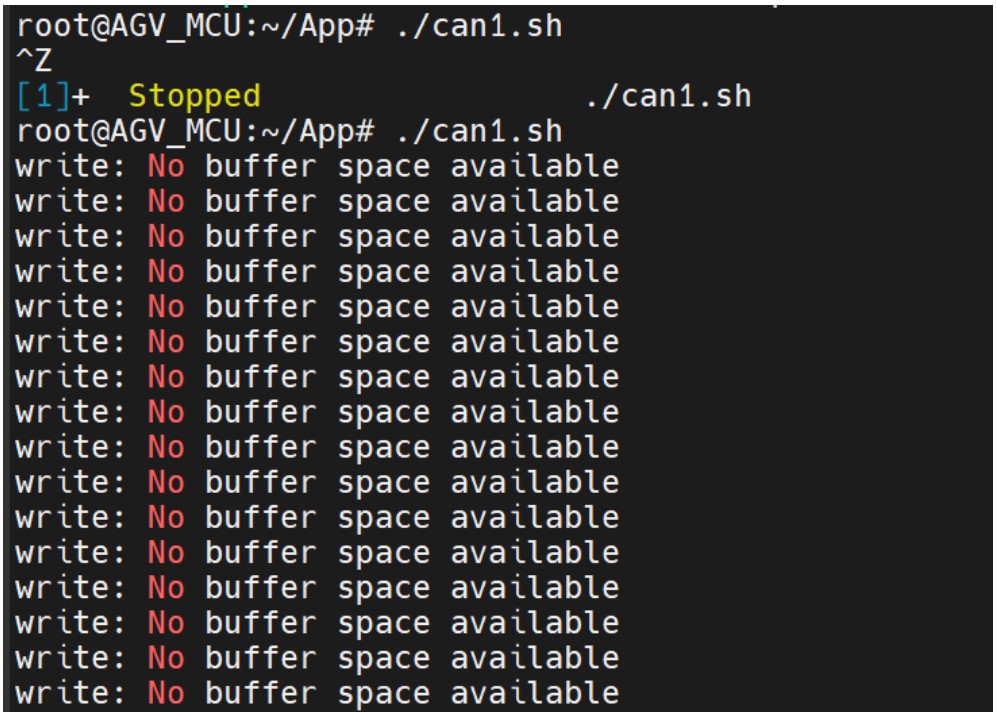
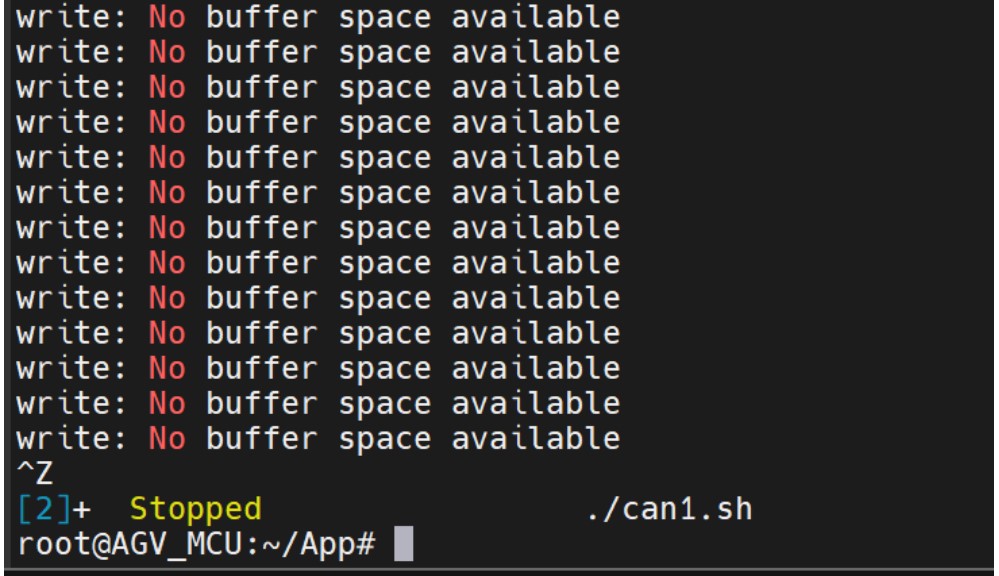
can1测试通信时,十几秒后就报“write: No buffer space available”,网上查找该报错,将qlen由10改成1000,但还是报错。源码没改,只把can1使能,帮忙看看可能是什么原因引起的,给下修改建议感谢!
报错截图
can1信息

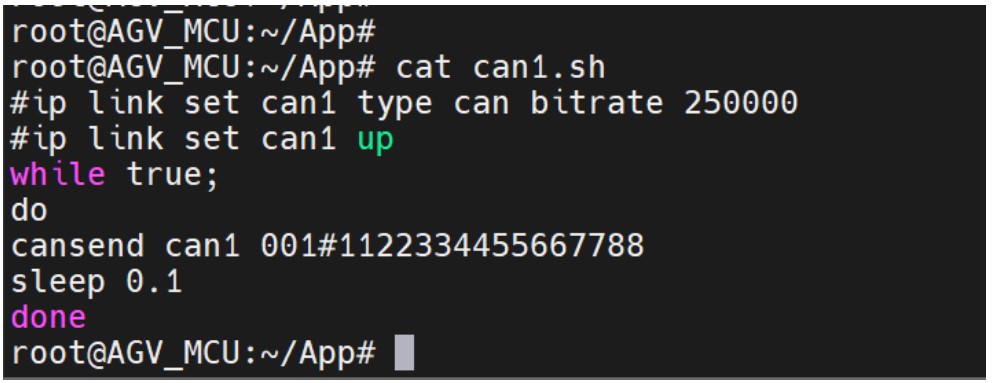
发送数据脚本
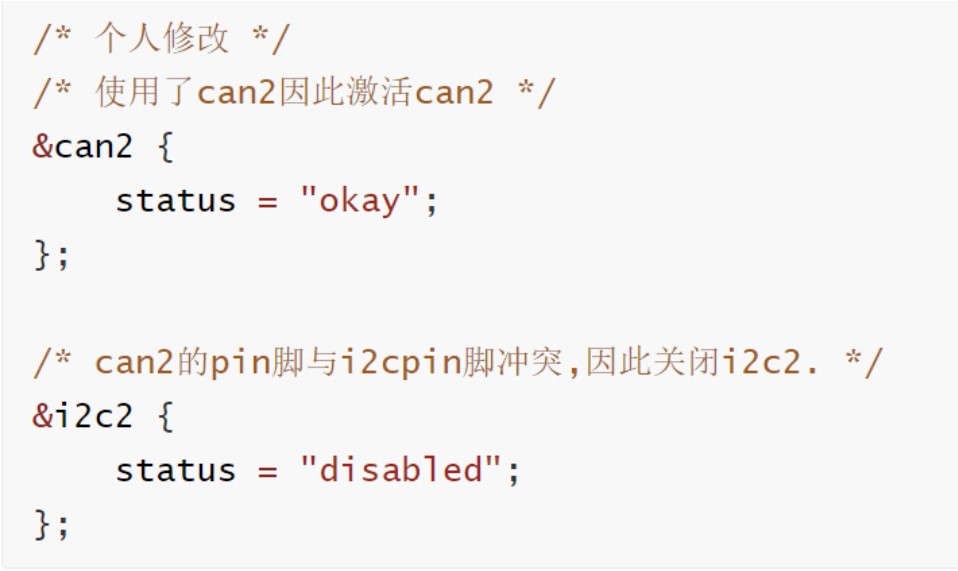
个人修改设备树
连上can分析仪,在上面发1000000比数据,间隔时间10ms,都有错误帧。间隔时间调到1ms,can总线就挂掉了


正常现象,底层驱动没有把数据发出去就会阻塞上层队列,而上层队列就如你所说的改成1000,代表上层缓存1000帧。你底层没有发生成功,他不会从上层拿数据,也就是上层队列满,你应用层写不进去。该问题最根本原因是,can驱动发送出去的数据没有收到发送确认信号,就不会打队列发送另一帧。
根据分析仪接上所看,可以看到检测接收端是否正常,波特率是否一致;然而你这个使用的是can1.0, 不支持同时发送和接收数据,同时发送和接收会有大量错误帧。
如果需要同时发送和接收数据,设备树更改在can下添加:
compatible = "rockchip,can-2.0";
你使用到的can才要更改,软件的can0是看谁先注册进来谁就是can0,后面的就是can1、can2....,而现在更改的是硬件的can1和can2,你只使能了can2,那软件上只会有can0
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32K3XX】FlexCAN 模块配置使用被打赏¥30元 | |
| 【S32K3XX】FlexCAN RAM 资源分配整理被打赏¥25元 | |
| 【S32K3XX】IPCF 适配核间中断处理被打赏¥21元 | |
| 【S32K3XX】IPCF 核间通讯模块UNMANAGED方式使用被打赏¥29元 | |
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |


 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

