
人形机器人概述
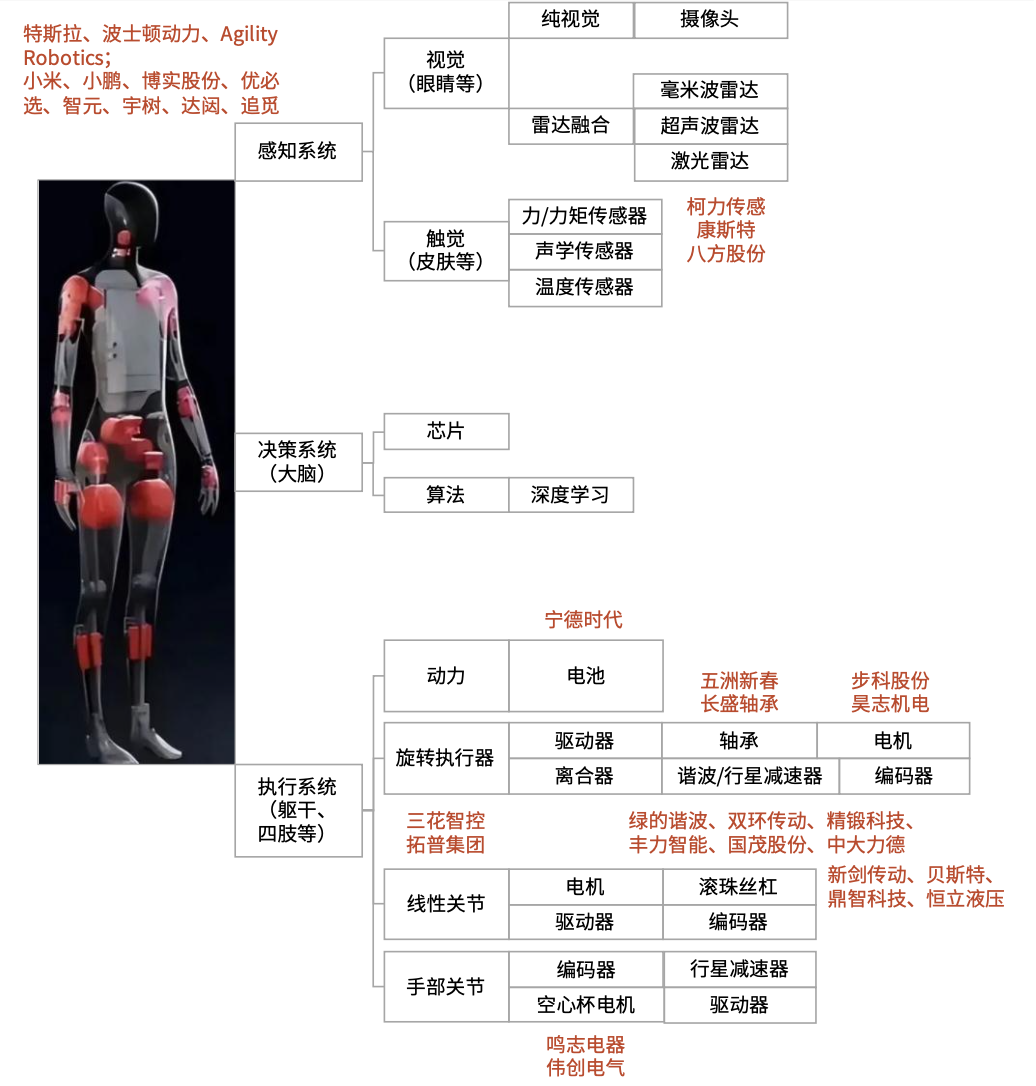
人形机器人是多领域交叉技术的产物,主要由三大系统组成:感知系统、决策系统和执行系统。
感知系统
感知系统是人形机器人获取外界信息的途径,主要由各种传感器组成。其中,视觉传感器用于获取图像信息,如摄像头、激光雷达等;触觉传感器用于感知触碰和压力,如力/力矩传感器、声学传感器等。这些传感器收集到的信息为机器人的决策和执行提供基础。
决策系统
决策系统是人形机器人的大脑,负责处理和决策各种信息。它由芯片和算法组成。芯片是硬件基础,提供计算能力;算法是软件基础,用于处理和分析传感器收集到的信息,并做出相应的决策。
执行系统
执行系统是人形机器人的行动部分,由动力单元、旋转关节、线性关节和手部关节等组成。动力单元为机器人提供能量和动力;旋转关节和线性关节用于实现各种运动;手部关节则用于抓取和操作物体。
多领域交叉技术的应用
人形机器人的开发涉及机械、电气、人工智能等多个领域。机械设计用于构建机器人的物理结构;电气工程用于设计和控制机器人的电路和电机;人工智能技术则用于开发机器人的感知、决策和学习能力。
与机器人动力相关的公司,如特斯拉、波士顿动力、Agility Robotics、小米、小鹏、博实股份、优必选、智宇、宇树、达闼、追觅等。
机器人的感知系统,包括视觉、听觉、触觉等不同方面的传感器。视觉部分由摄像头、毫米波雷达、激光雷达等组成,这些部分涉及到的公司或技术有纯视觉、摄像头、毫米波雷达、激光雷达、超声波雷达等。触觉部分由力/力矩传感器、声学传感器、温度传感器等组成,这些部分涉及到的公司或技术有柯力、四方股份、昊志机电等。
决策系统是机器人的大脑,负责处理和决策各种信息。这部分涉及到的公司或技术有芯片、算法、深度学习等。
动力系统为机器人提供能量和动力,这部分涉及到的公司或技术有电池、驱动器、旋转执行器、线性关节、手部关节等。电池部分由宁德时代提供,驱动器部分由五洲新春、长盈精密提供,旋转执行器部分由步科股份提供,线性关节部分由鸣志电器提供,手部关节部分由伟创电气提供。
执行系统是机器人的四肢,负责执行各种动作。这部分涉及到的公司或技术有离合器、谐波、行星减速器、编码器等。离合器部分由三花智控提供,谐波部分由双环传动提供,行星减速器部分由新剑传动提供,编码器部分由鼎智科技提供。
人形机器人关键硬件
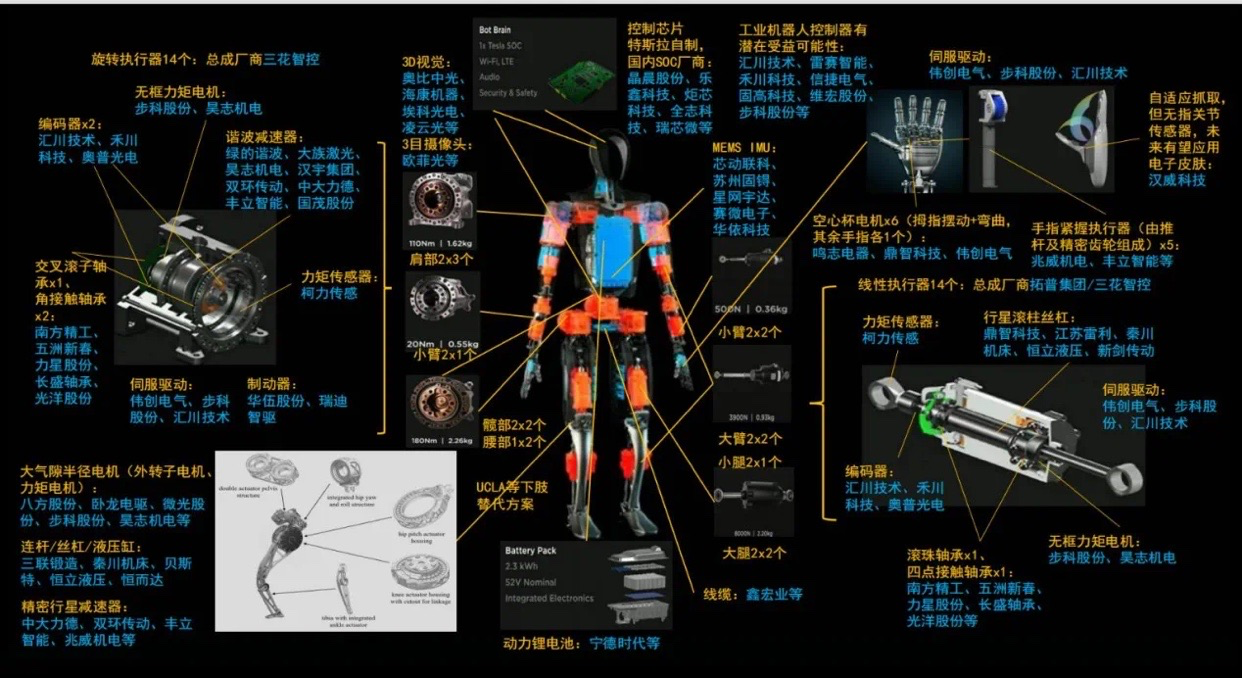
上面图图是人形机器人的详细构造图,展示了机器人的各个组成部分和相应的供应商。从图中可以看出,这个机器人具有复杂的结构和高度的精密性,它的设计和制造涉及到许多不同的技术和工艺。
首先,机器人的旋转执行器部分由14个供应商提供,包括步科股份、奥比中光、埃夫特、大族激光、苏州固锝、汉威科技、固高科技、汇川技术、雷赛智能、四联精密轴承、贝思特、恒拓高新传动、步科股份和埃夫特。这些执行器负责机器人的转动和移动,是机器人运动的关键部件。
其次,机器人的视觉部分由3D摄像头和MEMS IMU组成,这些组件由奥比中光、大族激光、苏州固锝、汉威科技提供。视觉系统使机器人能够感知和理解环境,进行精确的定位和导航。
此外,机器人的力觉部分由力矩传感器、行星减速机、线缆和连接件组成,这些组件由步科股份、埃夫特、雷赛智能、恒拓高新传动、汇川技术和鑫业盛等公司提供。力觉系统使机器人能够感知和响应外部力量,确保操作的安全和精准。
最后,机器人的控制部分由控制芯片和工业机器人控制器组成,这些组件由特斯拉、固高科技、汇川技术等公司提供。控制芯片和工业机器人控制器是机器人的大脑,负责控制和协调机器人的各个部分,确保机器人能够执行复杂的任务。
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
原文链接:https://blog.csdn.net/liangwqi/article/details/137639897
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

