
在无感FOC(Field-Oriented Control,磁场定向控制)算法中,动态响应和稳定性是电机控制系统中两个非常重要的性能指标。动态响应指的是系统对输入信号变化的快速反应能力,而稳定性则是指系统在各种扰动下保持运行状态不变的能力。这两者之间往往存在一定的矛盾,因此需要通过合理的设计和参数调整来实现平衡。以下是几种常见的平衡方法:
一、滤波器设计
滤波器在无感FOC算法中用于平滑电流和速度信号,减少噪声和干扰。滤波器的设计参数(如截止频率)对系统的动态响应和稳定性有重要影响。
1. 低通滤波器(LPF)
高截止频率:提高系统的动态响应速度,但可能会引入高频噪声。
低截止频率:提高系统的稳定性,减少高频噪声,但响应速度会变慢。
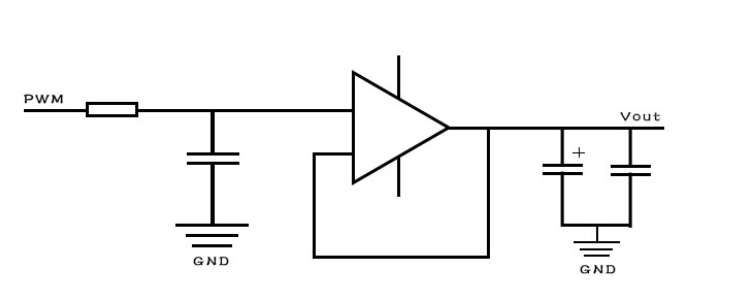
▲低通滤波器
2、平衡方法:
自适应滤波器:根据系统的运行状态动态调整滤波器的截止频率。在负载变化较大或动态响应要求较高的情况下,适当提高截止频率;在稳态运行时,降低截止频率以提高稳定性。
多级滤波器:使用多级滤波器,结合不同截止频率的滤波器,既能有效去除高频噪声,又能保持一定的动态响应速度。
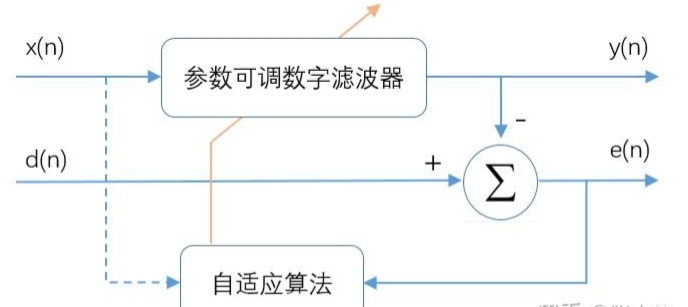
▲自适应滤波器
二、观测器设计
无感FOC算法中常用的观测器包括滑模观测器(SMO)和卡尔曼滤波器(KF)。观测器的设计参数对系统的动态响应和稳定性也有重要影响。
1. 滑模观测器(SMO)
增益调整:通过调整滑模观测器的增益,可以在动态响应和稳定性之间找到平衡。高增益可以提高动态响应速度,但可能导致系统不稳定;低增益可以提高稳定性,但响应速度会变慢。
饱和函数:使用饱和函数代替符号函数,可以有效抑制过大的抖动,提高系统的稳定性。
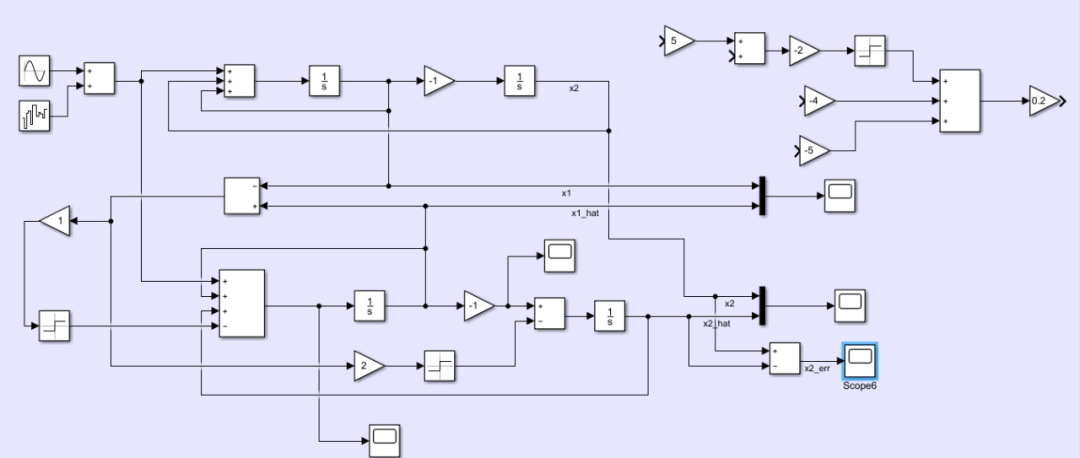
▲滑膜观测器仿真
2. 卡尔曼滤波器(KF)
噪声协方差矩阵:通过调整卡尔曼滤波器的噪声协方差矩阵,可以在动态响应和稳定性之间找到平衡。适当增加过程噪声协方差可以提高动态响应速度,但可能会引入更多的噪声;适当增加测量噪声协方差可以提高稳定性,但响应速度会变慢。
3、平衡方法:
自适应增益调整:根据系统的运行状态动态调整观测器的增益。在负载变化较大或动态响应要求较高的情况下,适当提高增益;在稳态运行时,降低增益以提高稳定性。
多观测器融合:使用多观测器融合的方法,结合不同增益的观测器,既能提高动态响应速度,又能保持系统的稳定性。
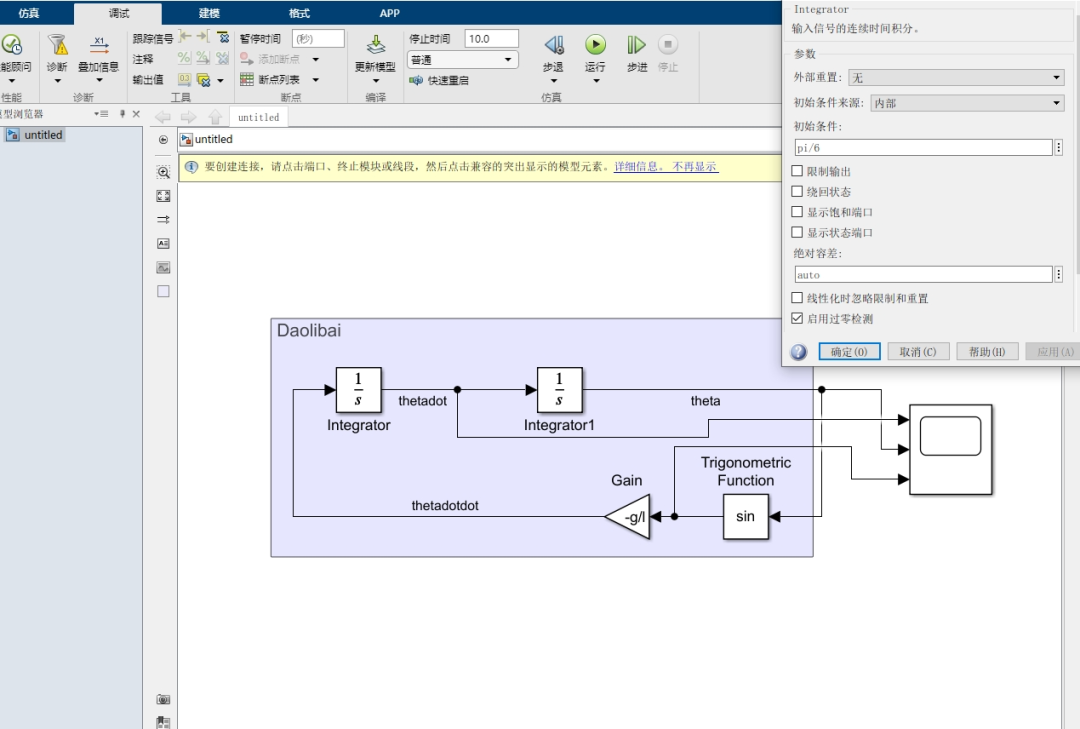
三、系统建模与仿真
通过建立系统的精确数学模型,并在仿真环境中进行参数调整和性能测试,可以有效预测系统的动态响应和稳定性。仿真工具(如MATLAB/Simulink)提供了丰富的建模和仿真功能,可以帮助工程师在实际硬件调试之前,找到一组较为合理的参数。
平衡方法:
参数扫描:在仿真环境中,对PI控制器参数、滤波器参数、观测器参数等进行扫描,找到一组在动态响应和稳定性之间平衡的参数。
性能指标优化:定义系统的性能指标(如超调量、调节时间、稳态误差等),通过优化算法(如遗传算法、粒子群优化算法等)自动调整参数,以达到最佳的性能平衡。
在无感FOC算法中,动态响应和稳定性之间的平衡是实现高性能电机控制的关键。通过合理设计滤波器、优化观测器参数以及利用系统建模与仿真进行参数调整,可以有效解决动态响应与稳定性之间的矛盾。这些方法不仅能够提高系统的整体性能,还能为实际工程应用提供有力支持。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

