
大家在运动控制的时候是用伺服电机的还是用步进电机做定位控制了?为什么有时候用伺服电机,有时候又步进电机?这是什么原因呢?本期我们就一起来探讨一下步进电机和伺服电机的区别!
工作原理对比
伺服电机和步进电机的核心区别在于控制系统原理。伺服电机采用闭环精准控制,而步进电机采用开环步进控制,这两种不同的工作原理决定了它们在精度、响应速度和成本等方面的差异。
什么意思呢?什么是开环?什么是闭环?要理解这个含义的话,那我们首先要明白他们的工作原理是怎么样的。
我们要驱动步进电机让他动起来,就要给步进电机发脉冲。比如说我发1000个脉冲,那么步电机就运行1000个脉冲,然后它停止。
那么问题又来了,什么是脉冲?
其实你可以把它理解为01信号,就是开关,开关,开关,开关。1000个脉冲就是有1000个开关。这是人力是不能实现的,这个时候我们要借助晶体管plc的高速脉冲口帮我们完成这种事情。这就是步进电机的驱动方式。步进电机的结构一般都是带小齿的,通过这些小齿从而能精准的发送每一个脉冲的角度是怎么样的,然后发多少个脉冲,然后它转一圈。
我们的步进电机驱动器一般上面都会有个细分,我们通过波动驱动器上面的细分,从而达到多少个脉冲转一圈。就在这里面设置的。
那我们伺服电机是怎么驱动的嘞?
其实也是一样,也是通过脉冲的方式驱动。但是他唯一不同的是。步进电机如果我发1000个脉冲,它突然停止了。我这个时候我就不知道他是否真的到了1000个脉冲停止了,还是半路出了问题停止的。他没有一个反馈信号。
而伺服电机就不一样了,我给他发1000个脉冲,他会实时反馈我当前走了多少位置。
为什么会出现这种现象呢?
因为步进电机只是单纯的在输入端给信号。而输出端是没有信号的。所以我只给了一个命令让你执行,他执行我也不反馈。而伺服电机不一样,他不仅在输入端有信号,输出端还会反馈一个信号
回来然后我们就可以看到他当前的位置是怎么样的。是否真的走完了1000个脉冲还是在半路停止了。
所以我们的伺服电机总是会带有一根编码器线。这个编码器线就是电机的反馈信号。而我们的步进电机是没有这个东西的。
这就是简单的开环和闭环。有头有尾是闭环。只有头那就是开环。
控制区别
伺服电机:闭环精准控制
伺服电机采用"GPS导航"式闭环控制系统,确保极高的精度和动态响应性能。
编码器反馈系统
如同GPS实时定位,编码器持续监测转子位置,精度可达0.001mm级别。
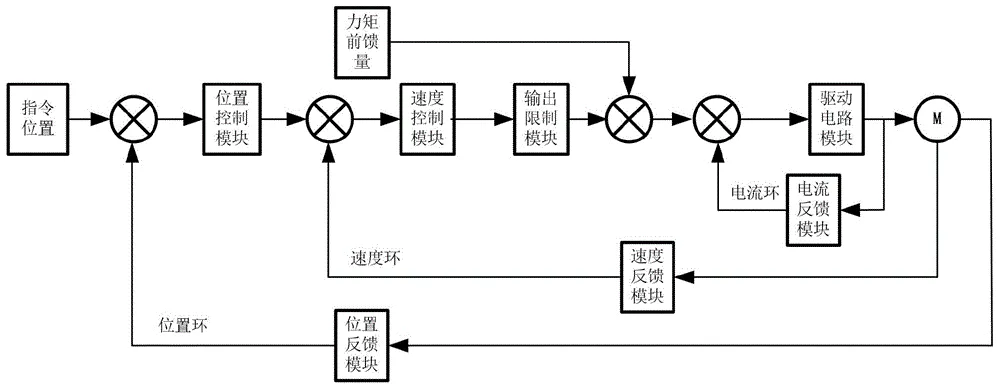
三环调节机制
电流环(最内层):像肌肉调节发力大小
速度环(中层):如车速表维持恒定速度
位置环(外层):类似导航系统修正路径
步进电机:开环步进控制
步进电机工作如同"数步子走路",通过脉冲信号实现精确的角度控制。
脉冲驱动机制
每个脉冲对应固定步距(如1.8°),通过脉冲计数实现角度控制。
开环工作模式
像盲人按固定步数移动,系统无法自动检测和纠正位置偏差。
选用
我们在做项目时,如果定位精度要求不高的话,我们可以考虑上步进电机。如果定位精度高的话,那就是上伺服电机。
如果项目真的是又要求定位稍微精准一点。而价格利润又比较低的情况下,我们可以采用步进电机加编码器的组合进行。
总而言之一句话,想高精度高定位上伺服,低成本的话就步进加编码器。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

